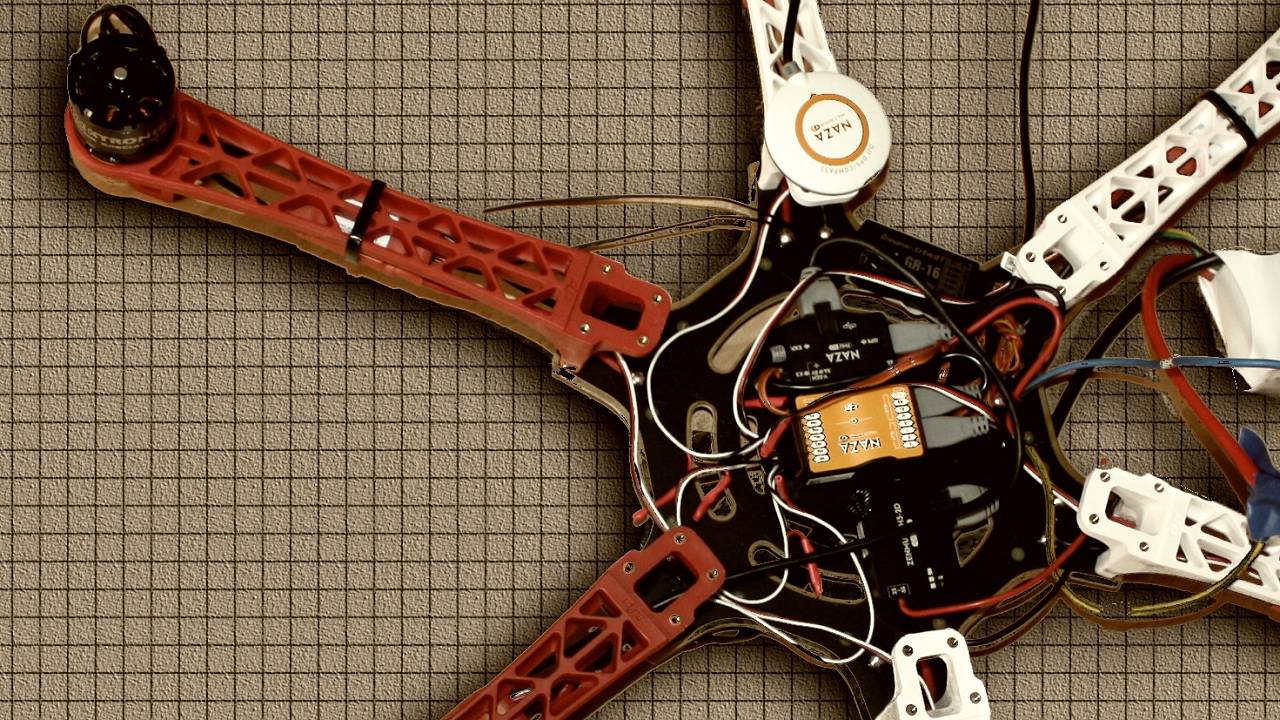
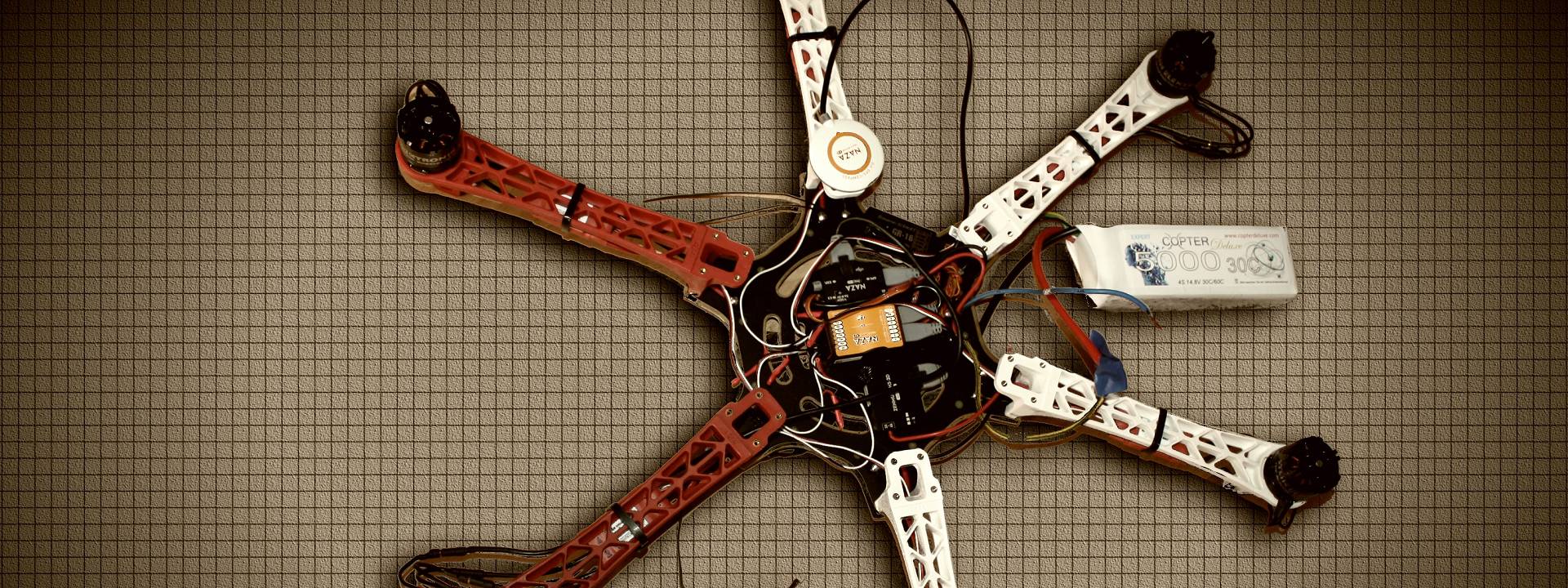
Arduinoでドローン(クアッドコプター)を製作をしてます。制御基板(回路)、制御プロクラムは自作。フレーム、モーター、バッテリーなどは既製品使って自作してます。そのうちフレームも自作したいです・・。その製作記録(日記)です。
数か月ぶり?開発再開してます・・。
▼テスト飛行の様子▼
壱号機のテスト飛行の様子です。風が強いのか私が下手なのか操縦が難しいです。
- 組立開始
- 組立②モーター取付
- 組立③配線
- モーター、無線通信、PCモニターの可動確認
- 配電基板作成~機体完成まで
- オイラー角、行列、四元数
- モータの推力を実測してみる
- ノイズの原因と対策
- テストフライト
- 小休止)ブラシレスモータを描いてみる
- USBゲームコントローラーで操縦できるように改造
- PID制御とアルゴリズムの実機確認
- 回路図と姿勢制御プログラムの概要
- 6軸センサーから姿勢角度の算出について
- 制御プログラム解説(モーター制御編)
- テストフライト②(屋外)
- 制御プログラム解説(PID制御編)
- 気圧センサーで高度(高さ)をテスト検出
- 弐号機の作成開始
- 弐号機の回路図
- 姿勢演算の高速化
- ArduinoからGPSモジュールを使ってみる
- 超音波センサーで距離を測定
- 弐号機のフライトコントローラー作成
- 弐号機の稼働確認(制御、通信)
- 地磁気センサーから方位(角度)の計算方法