ドローン(マルチコプター、クアッドコプター、クアッドローター)の組み立ての続きです。暇を見つけて少しずつ組み上げているのですが、なかなかに進捗が悪いです。早く姿勢制御プログラムに取り掛かりたいのですが・。ハードができないとどうしようもありません。
今回は配線(結線)関係です。
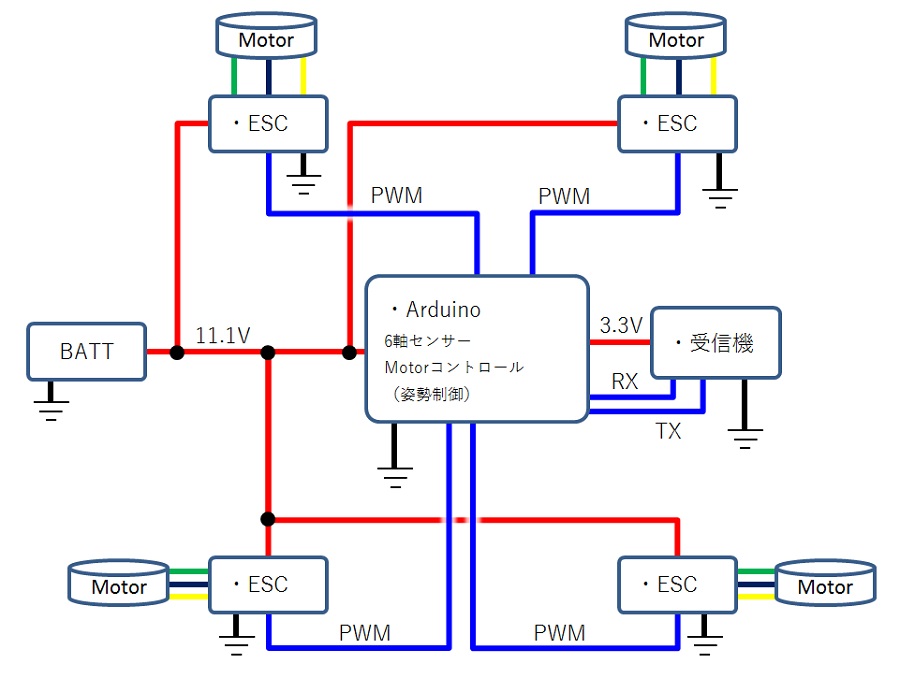
▼配線のイメージはこんな感じです▼
配線関係はとりあえずハンダ直付けで全て繋いでいきました。
▼ESC+モーター▼
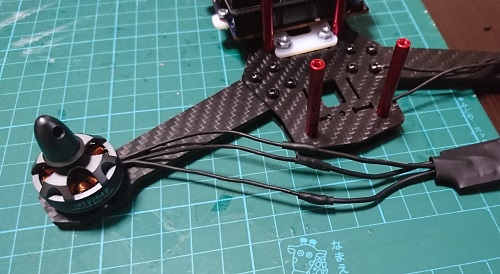
こんな感じで電線同士をハンダで直付けしていって、そのうえから収縮チューブ被せてます。
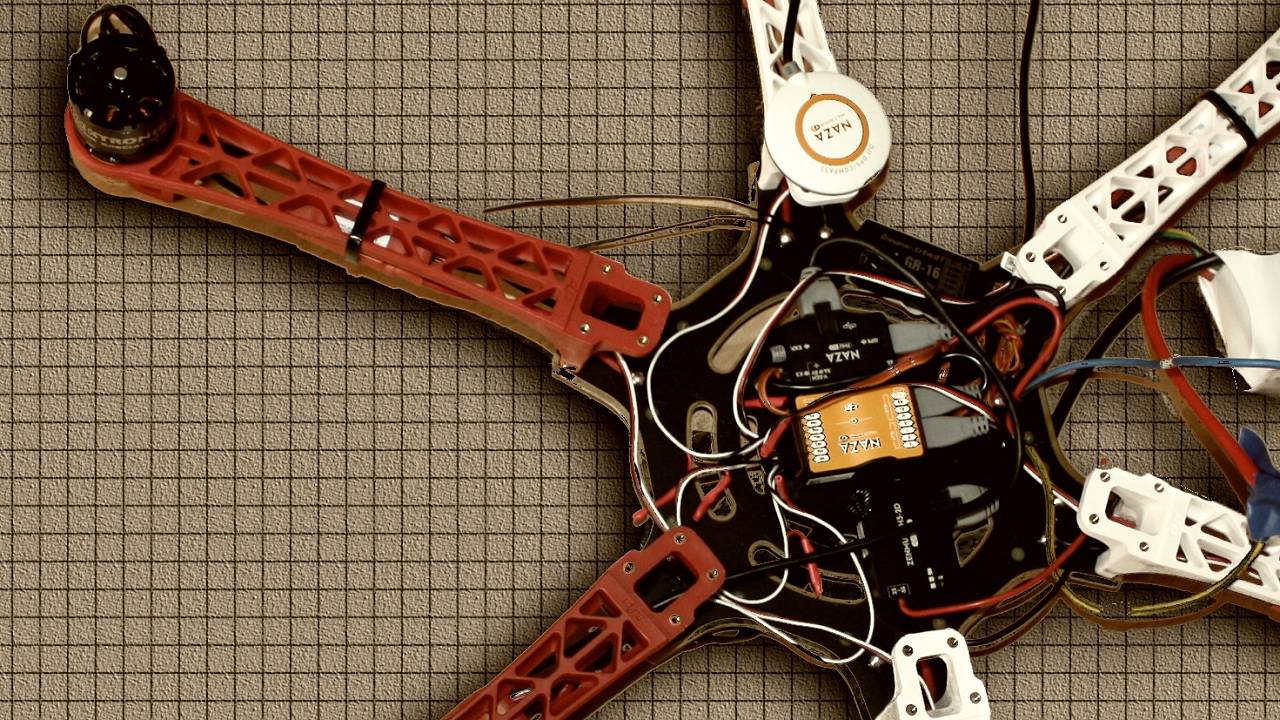
▼ESCとモーターを4個繋いだところです▼

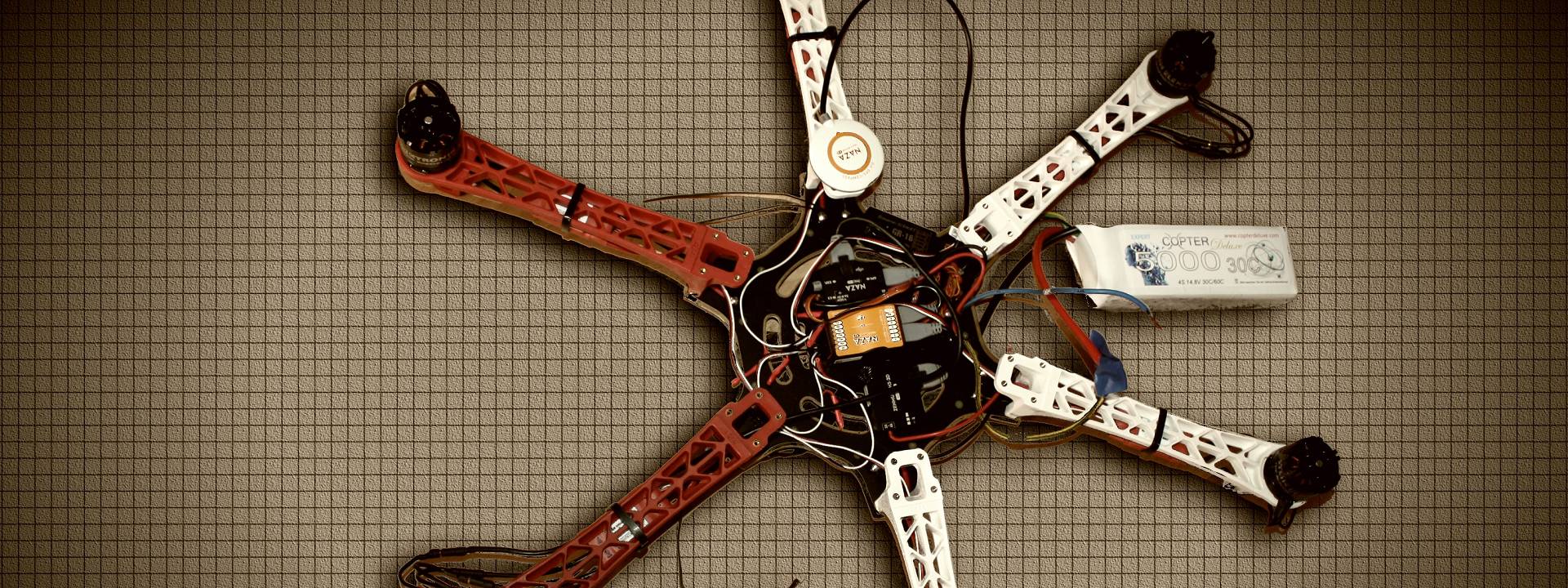
▼とりあえず纏めてます▼
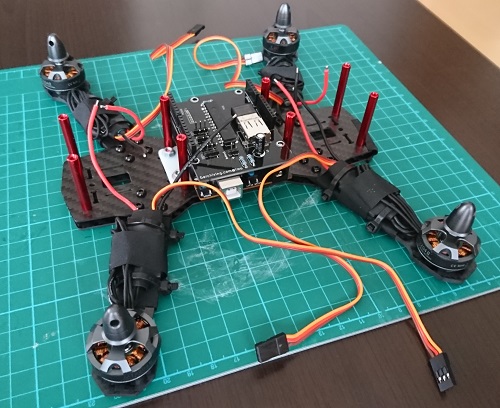
取り廻し何も考えずとりあえず繋いでしまいました。
可動確認(通電確認)が一通り終わって目処がたったら配線関係(取り廻し)は見直した方がよさそうです。
ここまでくるのにだいぶ時間が掛かってます。器用な方であれば2、3時間で終わるくらいではないでしょうか。そろそろ通電して可動確認できそうです。
ドローンの製作記録はこちらに纏めていってます。
コメント