
ある程度制御ができるようになってきたので自作した機体のArduino廻りの回路と姿勢制御ソース(アルゴリズム)の概要を少しずつ紹介したいと思います。
(これまでのドローン製作記録はこちらに纏めていってます。)
Arduino廻りの回路図

Arduinoの電源はESCのBEC端子は使わずに直接バッテリーからもらってます。受信機はシリアル通信経由でBluetoothモジュールで行ってます。
ESCへの制御信号は、ArduinoライブラリでPWM制御する予定で3,5,6,9pinに接続していたのですが、最終的にはライブラリ使わずループ制御でPWM信号作ってます。このあたりはそのうちソース説明するときに詳しく紹介したいと思います。
あとはバッテリ電圧を監視するための分圧抵抗とインジケーターにするLEDを接続しているだけの割と簡素な回路です。
姿勢制御プログラム概要
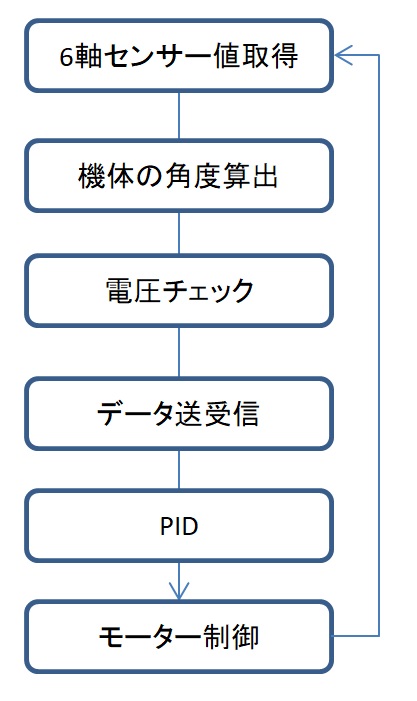
ソースの概要です。なるべく簡素で分かりやすいプログラムにしたかったのでループ制御のみで行ってます。データ送受信はポーリングで。モーター制御のPWM出力もループ制御で生成しているため、ここら辺がネックで制御周期は250Hz(4ms)です。
オープンソースとなっているプログラムがたくさんあるので、そういったものを参考にさせてもらって作成してます。
各項目の詳細は次回にでも説明したいと思います。
コメント
面白いWeb page有難う御座います。ドローンの制御回路を応用して10~20馬力の農業用ガソリンエンジン(ホンダなど)のドローンを制御出来れば林業用に山の上から麓迄運び 日本の山林の間伐が林道を作らなくても麓の広場に集めて 現存する外国の小型移動用の製材機械でその場で2*4或いは2*6の建築材或るいは集成材の元に為る材料の生産と山の管理が同時に出来るのでは無いだろうか。何れにしても水害や山崩れを防ぐには山の木を管理しなければ為りません。世界中で今迄の伐採は禿山にする方法が取られましたが近年では水害や山崩れを防ぐ選択的伐採が行われているのでこういうドローンの需要が出て来るでしょう。
1トンの荷物が運べて比較的小型で在れば日本の山崩れを未然に防ぎ安価に山奥の木を選びながら伐採できる筈です。このタイプのドローンの需要は傾斜面を有しながら木材が豊富に在る海外の地域などでも需要が在るでしょう。私の住むカナダでもお隣の州のブリテイシュコロンビアは山深いので使えるでしょう。私の住むアルバータ州(日本の約2倍)では州の5分の3が雑木林や森林ですが比較的平らなので私の森林では(640エーカー)必要では無いですが。。。