Arduinoでクローラーロボット(戦車ラジコン)を製作してます。筐体は3Dプリンターで作成、3Dモデル、制御基板、プログラムなど基本的なものは全て自作。最終的にはカメラ乗っけてFPV(一人称視点)で操作できるようにしたり、いろいろセンサーやGPSとか載せて走行をモニタリングできるようにしてみたいと思ってます。その製作記録です。
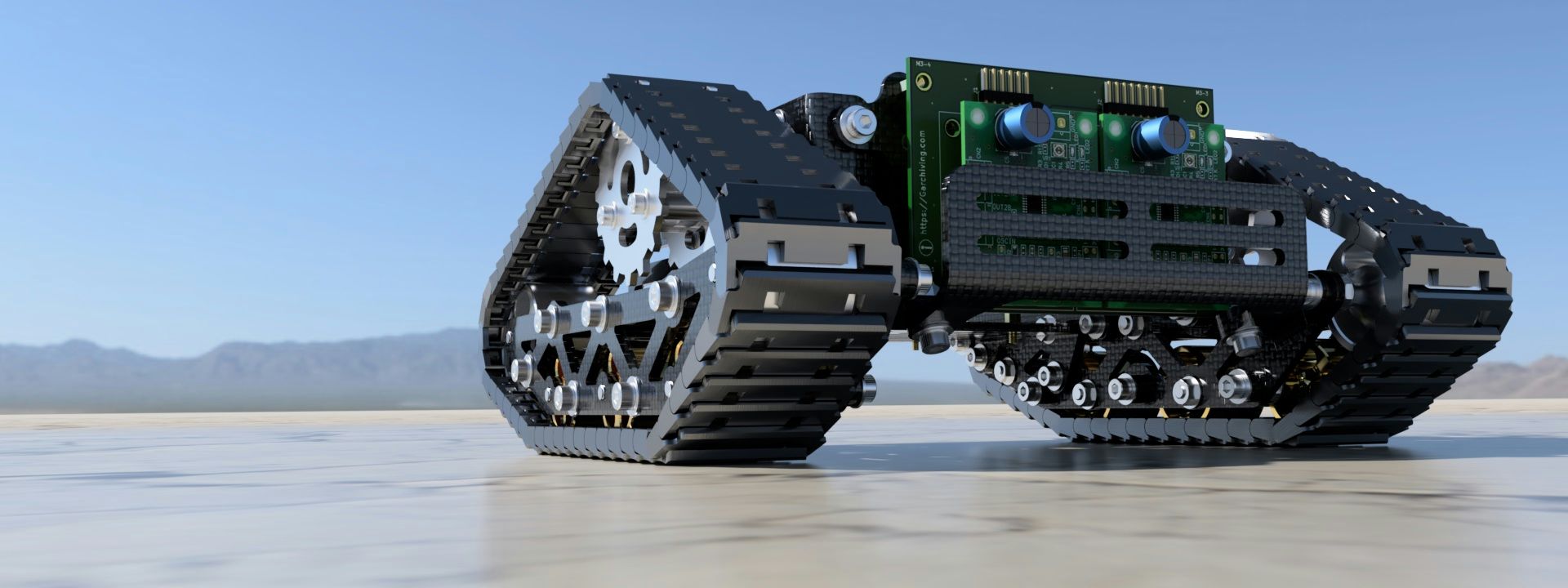
やりたいことは一通り入れてみました。これでひとまず完成。地磁気センサーの上にバッテリおいてるので方位が反応してません・・・・。気が向いたらボディ作ろうかな・・。
▼こちらで3Dモデル、回路図(ソースコード)の頒布を行ってます▼
 Arduino クローラーロボット(戦車ラジコン) - imo Lab. - BOOTH【商品説明】 クローラーロボット(戦車ラジコン)の作成デジタルコンテンツです。 ・3Dプリンター造形用の3Dモデル(.step) ・回路図 ・ソースコード ロボット制御はArduinoベース、送受信の制御はパソコン(Processing)で...garchiving.booth.pm
Arduino クローラーロボット(戦車ラジコン) - imo Lab. - BOOTH【商品説明】 クローラーロボット(戦車ラジコン)の作成デジタルコンテンツです。 ・3Dプリンター造形用の3Dモデル(.step) ・回路図 ・ソースコード ロボット制御はArduinoベース、送受信の制御はパソコン(Processing)で...garchiving.booth.pm
 クローラーロボット(戦車型ラジコン)|imoArduinoベースで自作できるクローラーロボットの自作データです。 以下記事購入頂くと ・3Dプリンタ造形用の3Dモデル(.stl) ・回路図&基板ガーバーデータ ・ソースコード(ESP32およびPico、Processing) がダウン...note.com
クローラーロボット(戦車型ラジコン)|imoArduinoベースで自作できるクローラーロボットの自作データです。 以下記事購入頂くと ・3Dプリンタ造形用の3Dモデル(.stl) ・回路図&基板ガーバーデータ ・ソースコード(ESP32およびPico、Processing) がダウン...note.com
作成記事
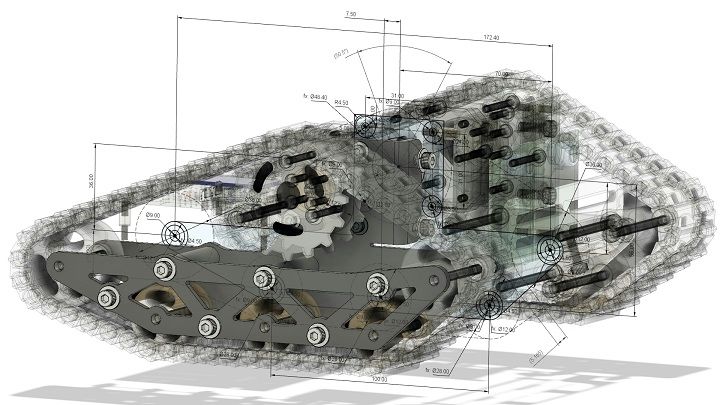
- 構想設計(3Dモデリング)
- キャタピラ(クローラー)の作成
- バランスが悪いのでモーターの位置をずらす
- ハード(筐体)の設計完了。(3Dモデリング)
- 制御基板を考える
- ホイールの作成
- 足廻りの作成
- 足廻りの動作確認
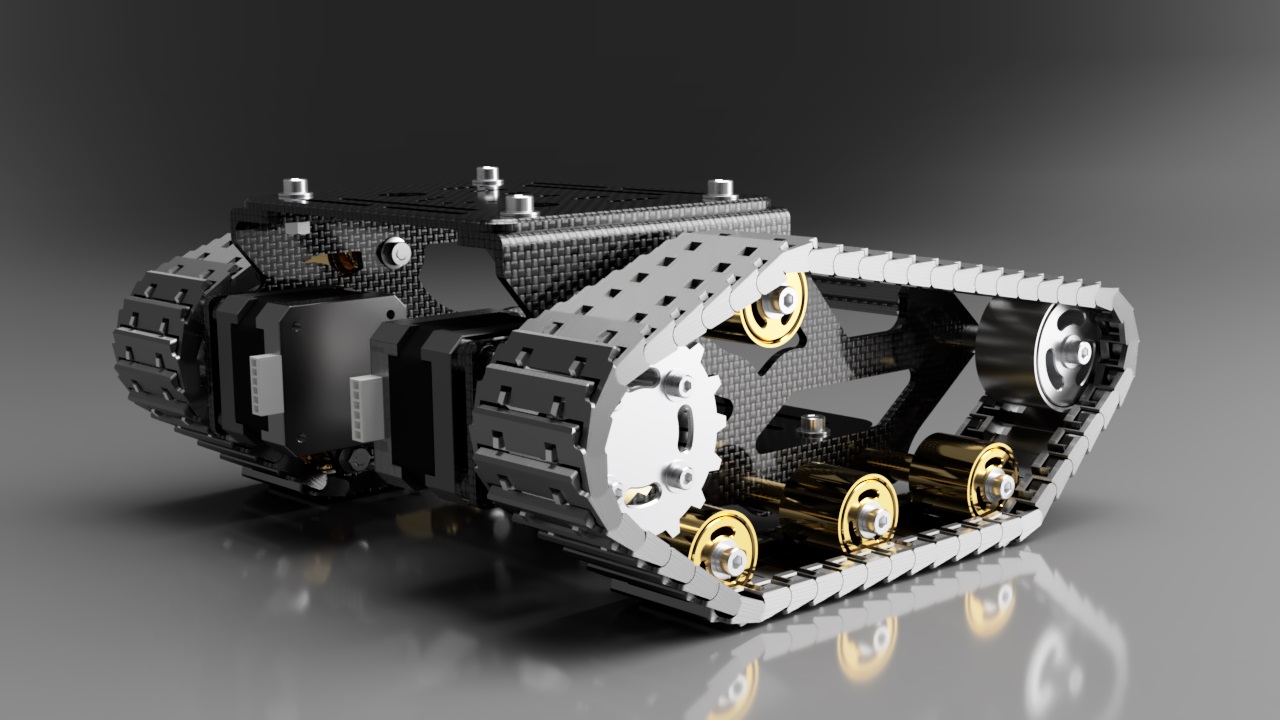
- ハード部分の完成
- 動作確認
- 3Dプリンターで歯車
- 回路基板(ソフトウェア)
- RaspberryPi で動画を配信する
- サーボモータでカメラを動かす
- カメラを搭載
- ラジコン戦車の3Dモデル
- FPVカメラの動作確認(いったん完成)