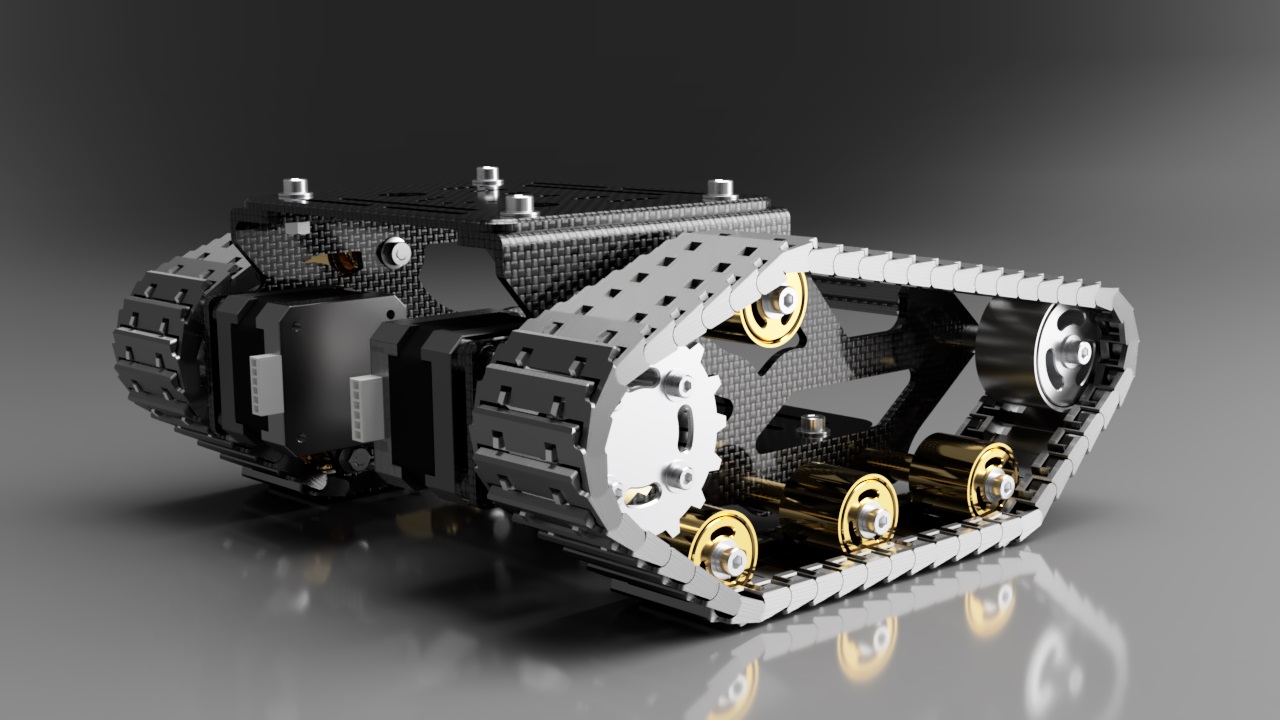
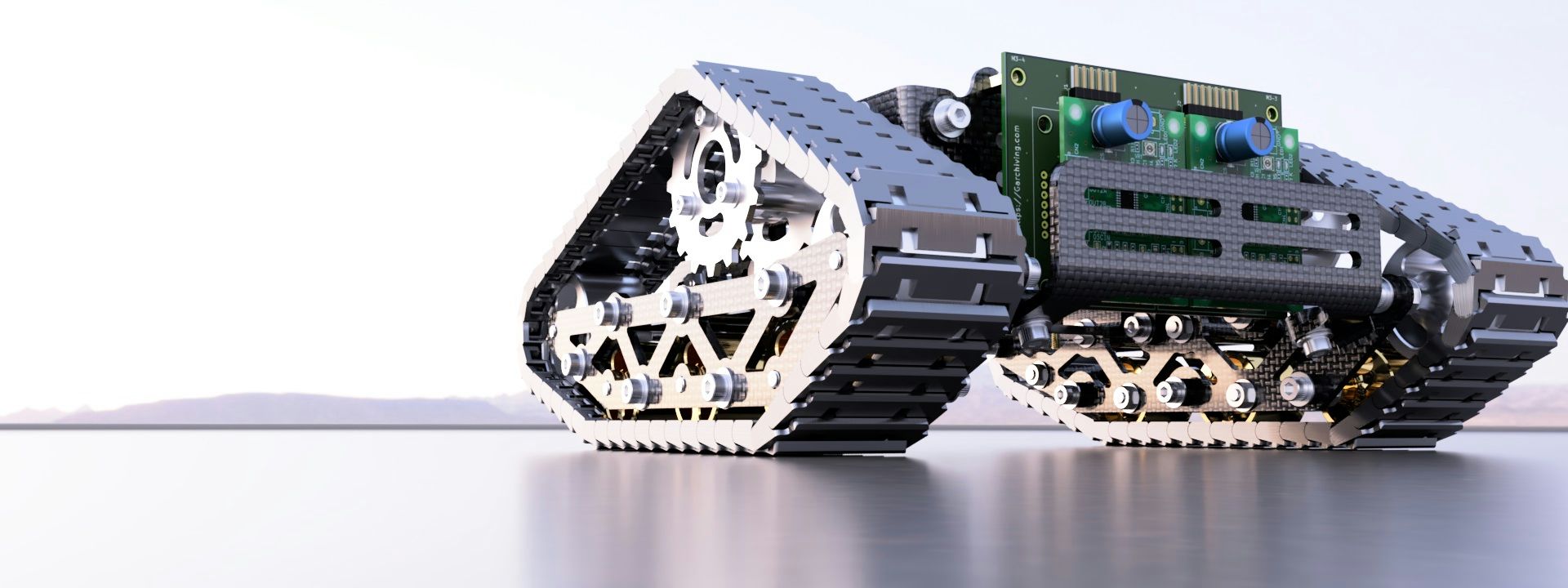
Arduinoと3Dプリンターでクローラーロボット(ラジコン戦車)の自作です。
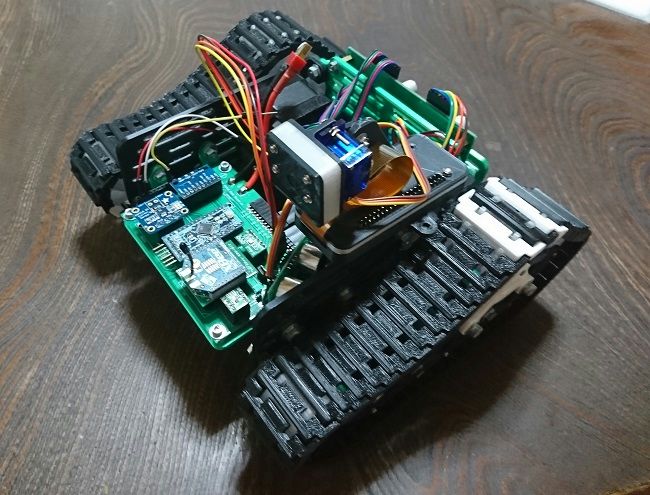
搭載したカメラの動作確認をしてみました。
▼FPVカメラ動作確認▼
ソフトウェア廻りは動画ストリーミングするためにだいぶ改造。一人称視点(FPV)の映像を大きく映して、その上に各種モニター(電圧、電流、気温、気圧、湿度、ジャイロ、加速度、地磁気)した情報を被せてます。方位計は、残念なことに地磁気センサーとバッテリーが近すぎて全く機能していないです。それ以外はほぼイメージ通り完成です。
見た目が恰好悪いので気が向いたらぼろ隠しの意匠カバーを作ってもいいですね。とはいえいったんクローラーロボットの自作は完了です。次は何つくろうかな・・・。
▼製作記録まとめ▼

コメント
FPVがオサレですね。どうやって作るのだろう。動画冒頭のProcessingのソースが気になります(^^)
おつかれさまでした。次の作品も楽しみにしています
まつさん。いつもサイト拝見下さり有難うござます。
まだ次を何も決めてませんが、今後ともサイトをよろしくお願いします。