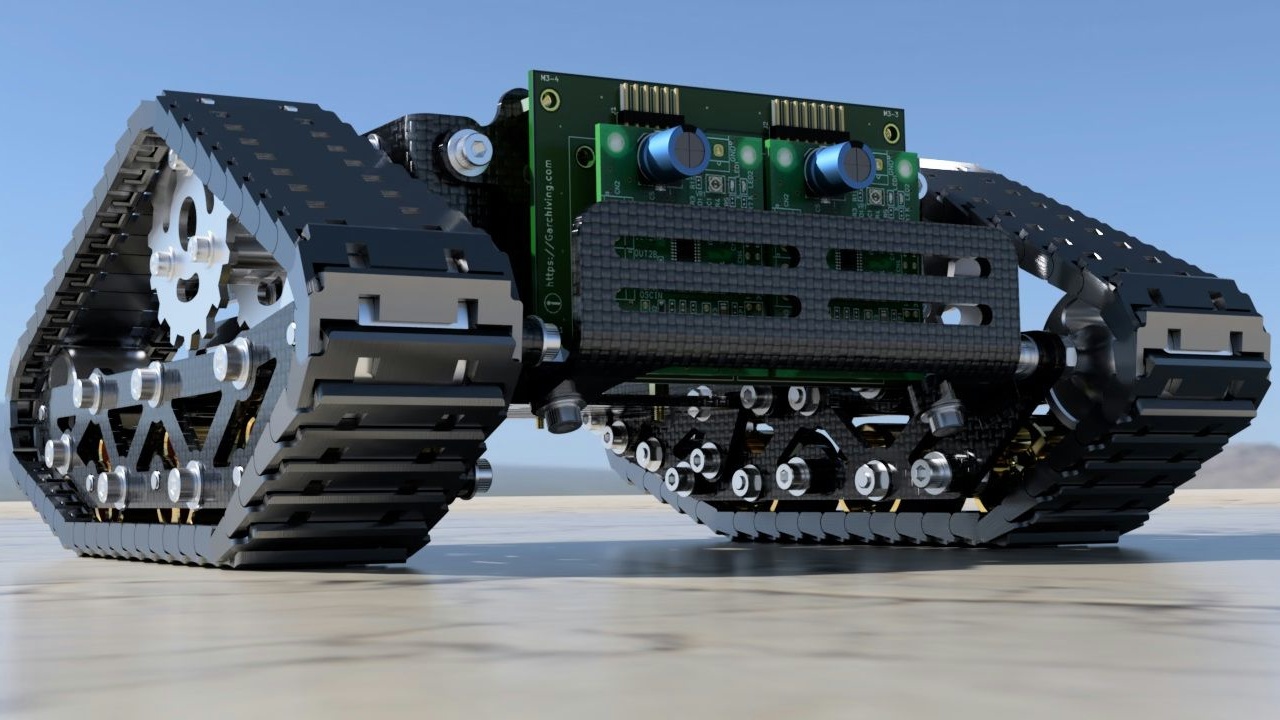
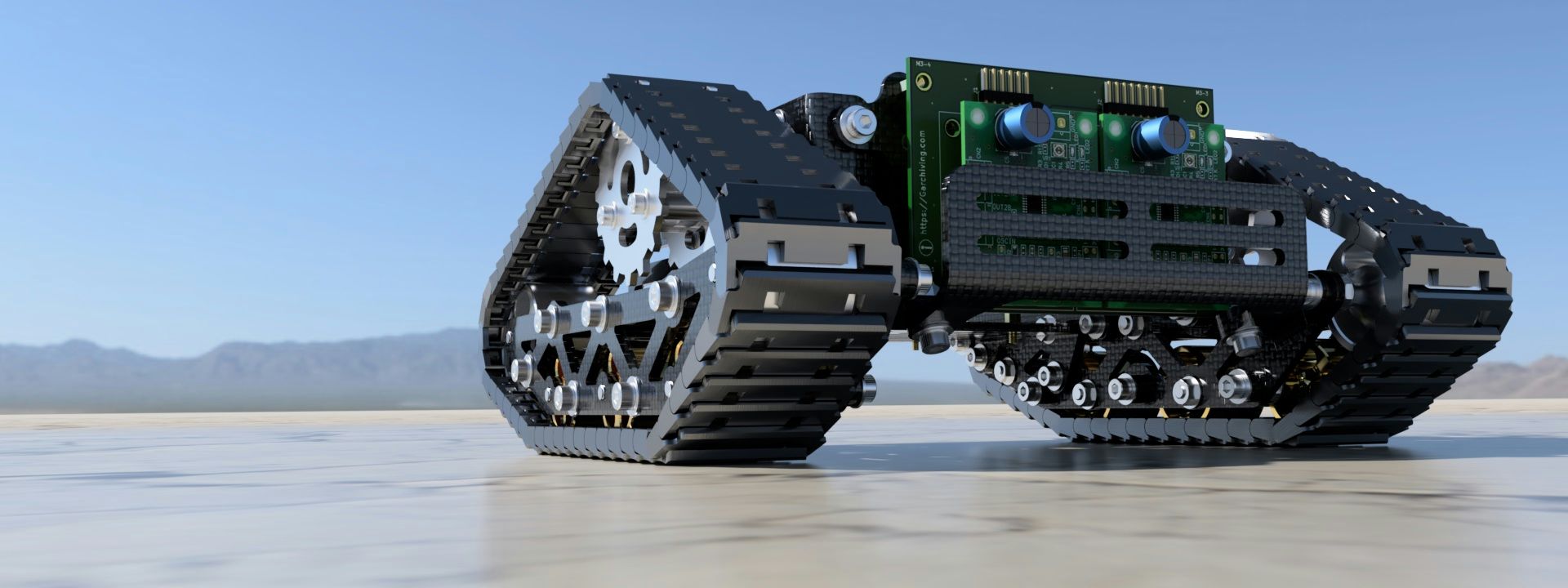
Arduinoでクローラーロボット(戦車ラジコン)の自作です。ざっくりハード部分の「設計」(3Dモデリング)が完了したので、今回はソフト部分(制御基板)の内容を紹介です。
▼これまでの製作記録はこちら▼

▼制御概要▼
どこまでやるかは今後の検討に後回しにするとして、今回はやってみたいことを全部載せてみます。というか持ってるセンサーモジュールを全て搭載する予定。
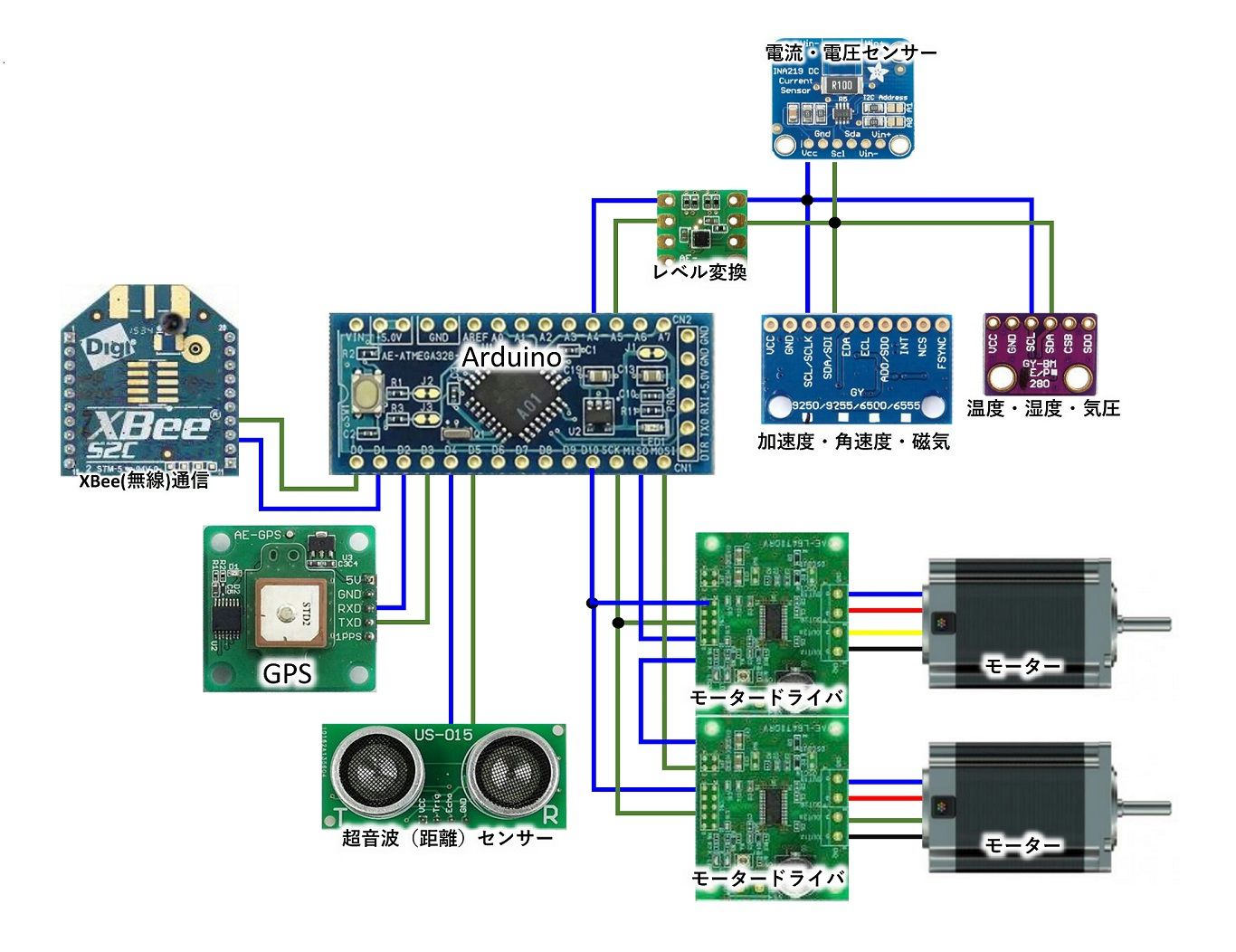
タイトルにもありますけど制御の中心はArduino。駆動部はステッピングモータが手持ちにあるのでそれを使う予定でドライバも手持ちにある「A4988」か「L6470」のどちらかを使用します。
センサー類はGPS、温度、気圧、湿度、電流、電圧、加速度、角速度、地磁気、距離(超音波)センサーといったところ。
あとこれ以外にカメラモジュール+ラズパイでwifi経由で映像ストリーミングなんかも実施してFPV視点で操作もできたら面白いかと思ってチャレンジする予定。ラズパイ使うならそれ一つで、制御全体を任しても良いんですけどね・・・。
コントローラーはモニターを兼ねてノートパソコンを使用する予定で、無線(Xbee)で双方向通信します。でここら各種機体情報をモニタリングするGUIアプリもProcessingで自作する予定です。過去ドローンや倒立振子を自作したときの物をベースにする予定です。
どこまで実現できるかわかりませんが、今のところの構想はざっとこんな感じ、、。
▼これまでの製作記録はこちら▼


コメント