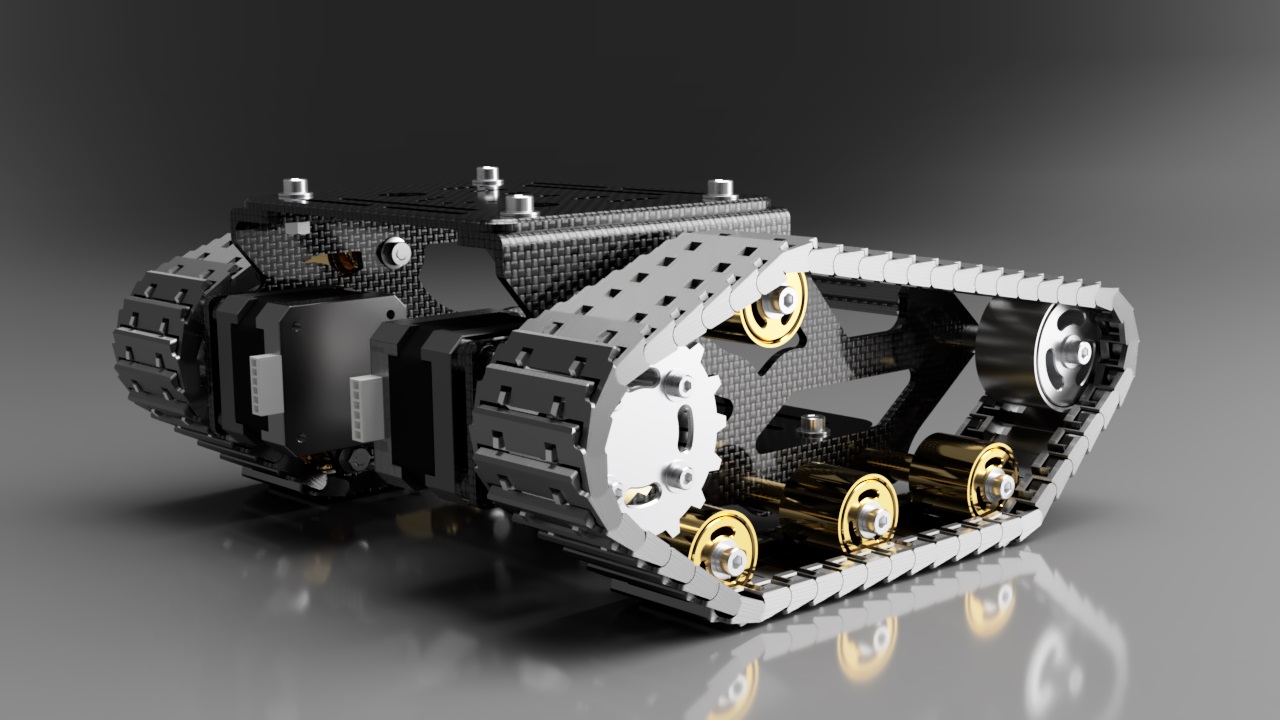

Arduinoでクローラーロボット(戦車ラジコン)の自作です。ハード部分の設計がいったん完成したのでその3Dモデルを紹介です。
▼完成イメージ(画像クリックで拡大)▼
構想時から結構変えてます。筐体は3Dプリンターで作成できるよう考慮して設計。ちょっとボルトナット使い過ぎかも。フレームの肉抜きは後から融通(拡張が)利くようにM4やM3のボルトサイズに合わせて抜いてます。
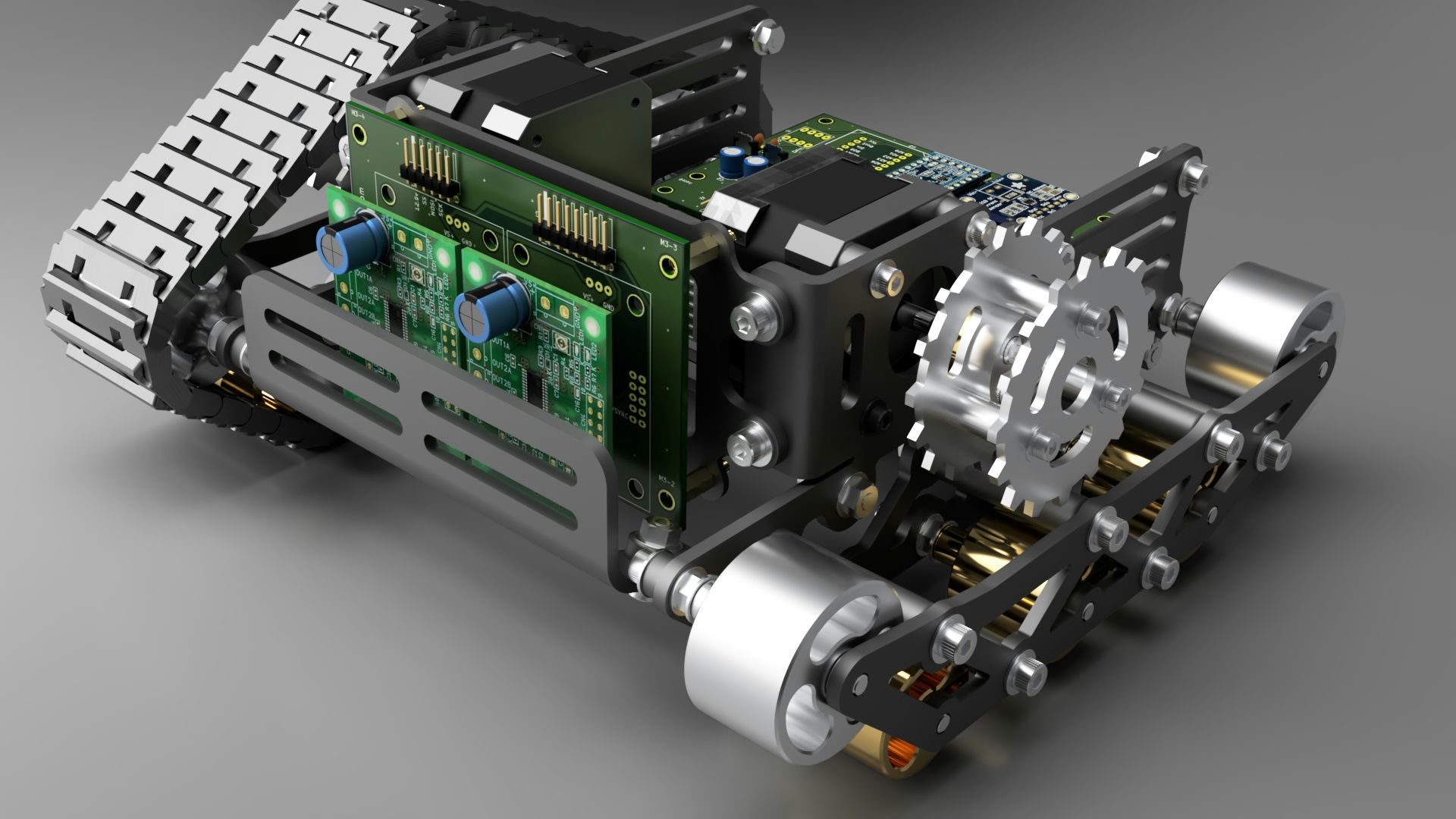
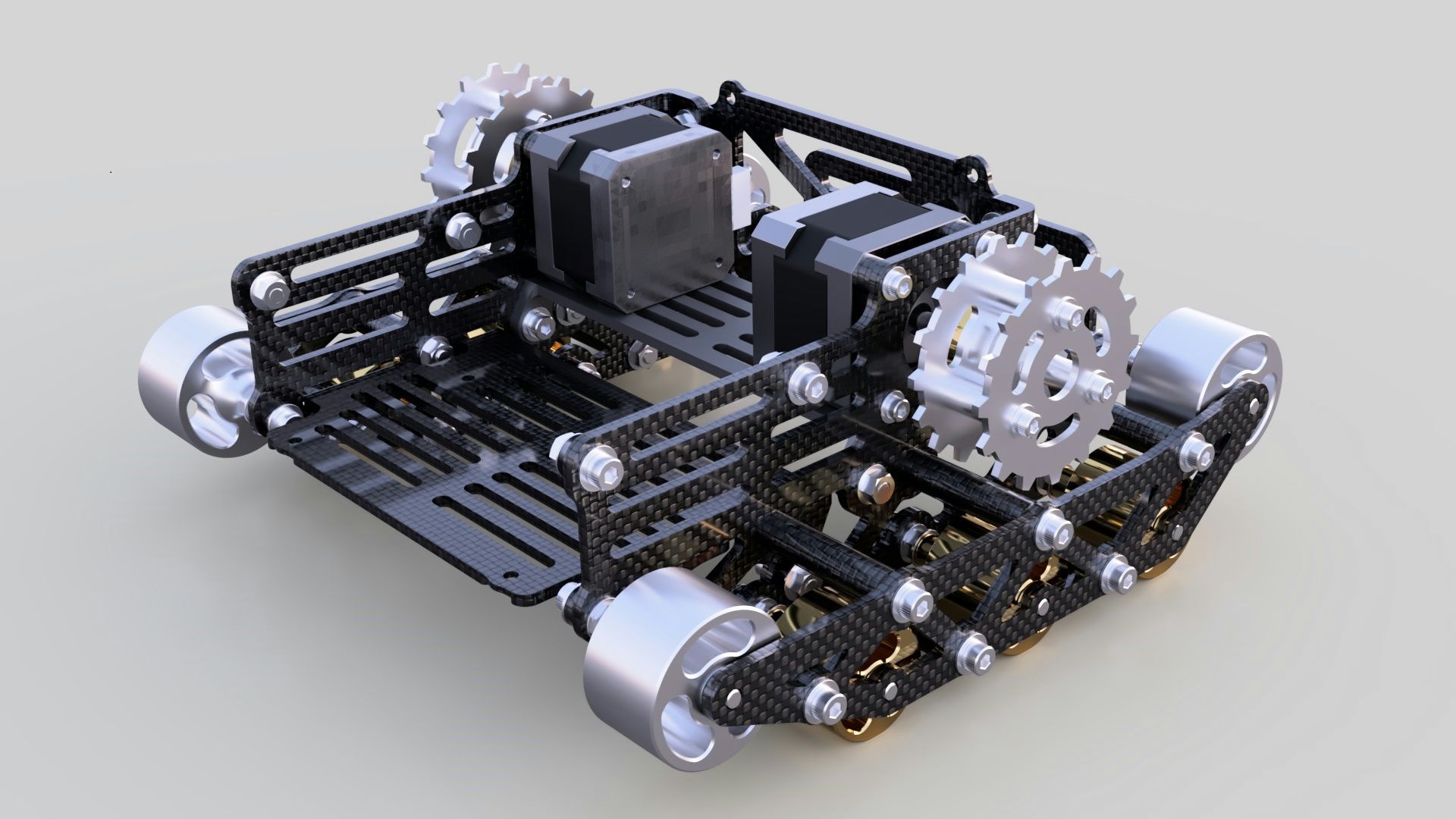
この時期なのに出かけることがなくて、多く時間があったのでわりと細かいとこまで設計(モデリング)してます。ひとりでモノづくりするのでここまで設計(モデリング)する必要ないんですけど、、いつもの自己満足です。
ほんとはあとここにバッテリー、超音波(距離)センサー、GPSを積む予定ですが、そこまでは作図してません。電線(空中配策)もモデリングしようとしたのですが力尽きました・・。設計には関係ないですが、気が向いたらモデリングしたいと思います。
▼これまでの製作記録はこちら▼

コメント