Arduino101 / Genuino101の内蔵6軸センサー(加速度、ジャイロ)のリアルタイムモニターをProcessingを使って自作してみようと思います。
Arduino.ccサイトで6軸センサーのチュートリアルにある、Processingでの可視化やMadgwickでのフィルタアルゴリズムは試してみたのですが、自作してみたい性分にかられまして..。
通信確認のトライをしてみました。
▼作りかけですがこんな感じの画面にしてます。とりあえずroll、pitchのモニター画面です。▼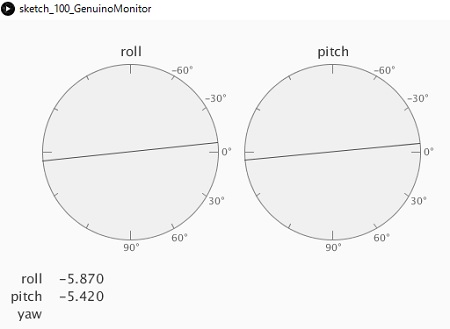
まずはここまで作って通信確認してみます。
Arduino101/Genuino101側では、単純に6軸センサーの取得。角度の積算値をシリアル送信してます。6軸センサーのキャリブレーション補正とz軸の加速度値1.00のときroll、pitchの角度積算値を0にリセットしているだけの補正を行ってます。
▼トライしてみました▼
通信はうまくいっているようです。
6軸センサーのドリフト補正はほとんど行っていないでの動きが少しおかしいですが・・・。ドリフト補正は今後の課題です。
これからモニター画面を仕上げていきたいと思います。yaw方向のモニターや各種センサー取得値、積算値、グラフ表示もできるようにしてみたいと考えてます。
モニター画面仕上げて、そのあとドリフト補正をゆっくり考えたいと思います。外付け部品無しでここまでできるのは大変有り難いです。
▼ドリフト補正もいろいろ試してみました▼
・加速度センサーから軸廻り角度への変換計算
・ジャイロのドリフト補正と比較(カルマン、相補フィルター)
・カルマンフィルターと相補フィルターをビジュアル比較してみました
コメント