Arduonoでクローラーロボット(戦車ラジコン)の自作です。今回は足廻り部分を3Dプリンターで作成していきます。(これまでの製作記録はこちら)
3Dモデル

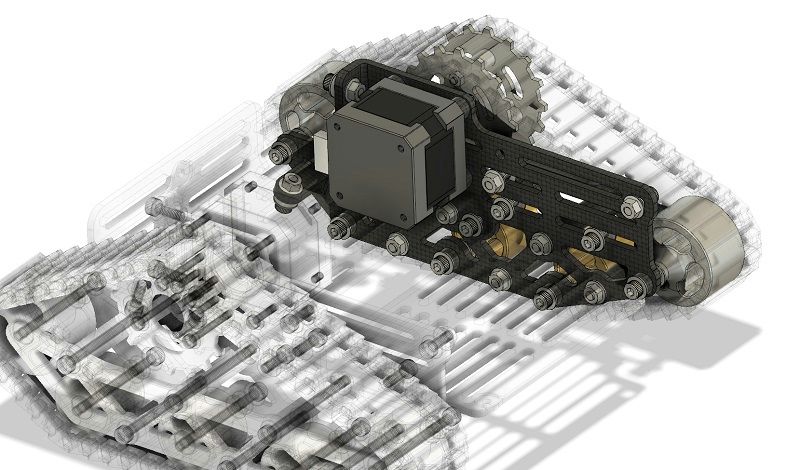
全体のイメージです。今回作成するところ以外は透かしてますがかえって見難いですね。
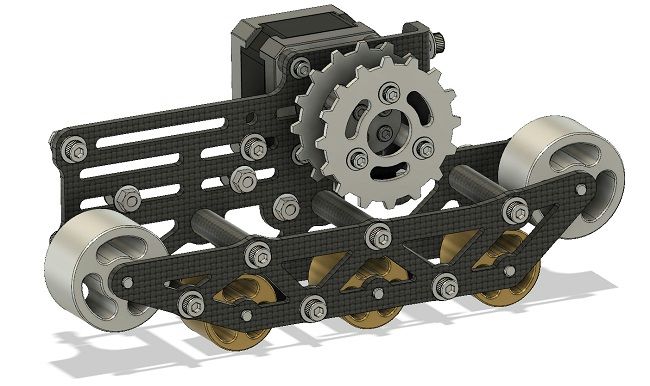
サイドパネルにモーター、スプロケ、ホイールなどの部品を全てぶら下げる構造です。非表示にしてますが、ここには以前3Dプリンターで作成しておいたクローラー(キャタピラ)を装着します。この設計モデルでプリンター出力して組み立てていきます。

3Dプリンターで出力
作成したモデルから部品を出力しました。

ひとつだけ3Dプリンター品じゃないのが混じってますが、、ステッピングモーターは既成品です・・。そのほかは3Dプリンター製。積層造形で作ることを想定してモデリングしているので無理のない造形となってます。材質は基本PLA、白いものだけPETGです。材質に意味はありません、、。
クローラー(キャタピラ)は写真では繋げてしまってますが、造形はひとつずつ作ってます。
組立て
組立てていきます。
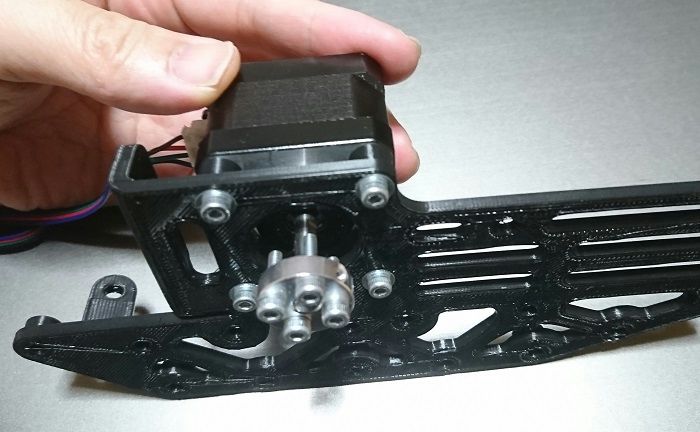
▲ステッピングモーターとサイドパネルをボルトで固定してスプロケ固定用ハブを取り付けておきます。
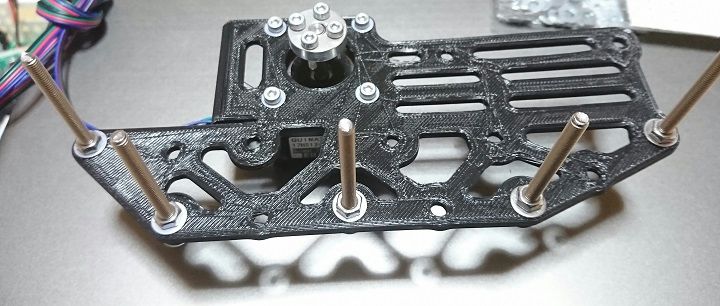
▲長めのボルトをシャフト替わりにします。ここにホイールをぶらさげます。ほんとはサスペンションの構造を取りたかったのですが、ちょっと難しかったので保留です。そのうち改造できればと思ってます。
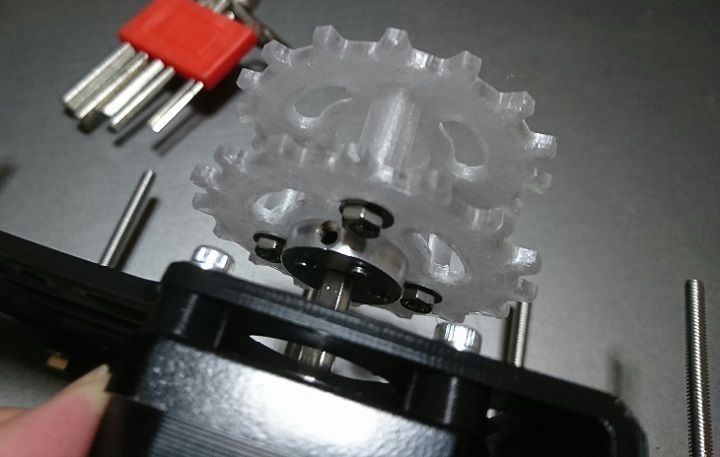
▲スプロケットを取り付けます。ステッピングモーターに直付けなのと径が大きめなのでトルクが少し心配です、、、がこのままいきます。

▲シャフト(ボルト)にホイールつけて、

▲カバーを被せます。

▲クローラー(キャタピラ)取り付けて完了です。

▲気になっていたスプロケとクローラーの噛合せも、手で廻す限りは悪くない感じはします。
概ねイメージ通りです。やはり3Dプリンターは便利でいいですね。自分で考えた物がこれだけお手軽に物にできるというのはいいです。
片側だけですが、これで足廻りは完成。とりあえずモーター廻してクローラー(キャタピラ)の動作確認してみたいですね。
▼こちらで3Dモデル、回路図(ソース)の頒布してます▼

▼これまでの製作記録はこちら▼
コメント
すごい!
processingのGUIを検索してて辿り着きました。こちらは10数年振りに電子工作を再開したばかりのものです。
3Dプリンター、Fusion,Arduino,Processing,無線、Lidar。かじり始めた全てを開拓してくれてます。
モデルのセンスも素晴らしいし。じっくり読ませてもらいます(^^)