ボール型ロボットの自作です。前回外殻ができましたので、今回からは駆動系(中身)を作り始めたいと思います。(ボール型ロボット製作記録はこちらにまとめてます)
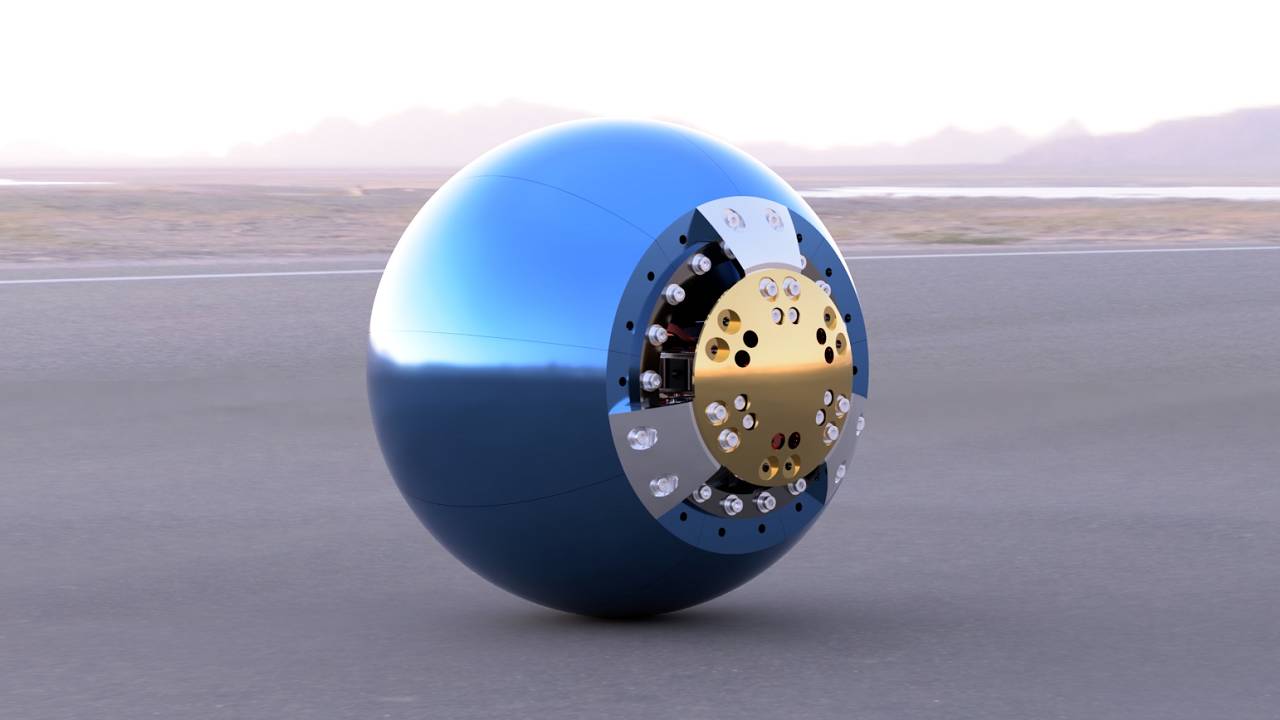
▼前回完成した外側▼
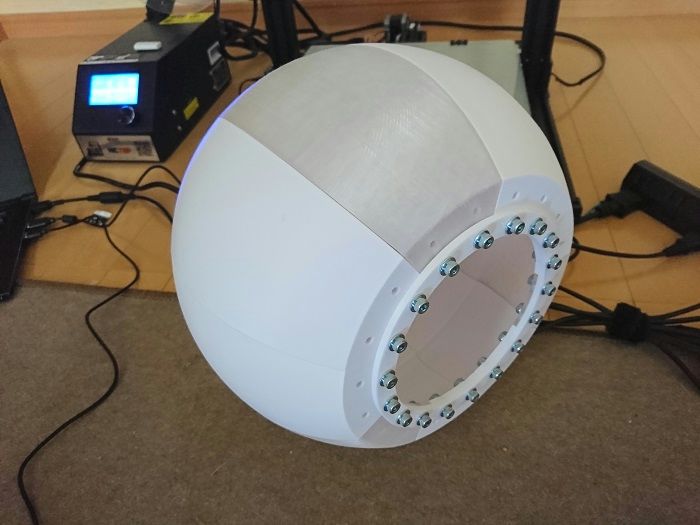
バスケットボールくらいの大きさです。
▼構想中の駆動系(中身)の雰囲気▼
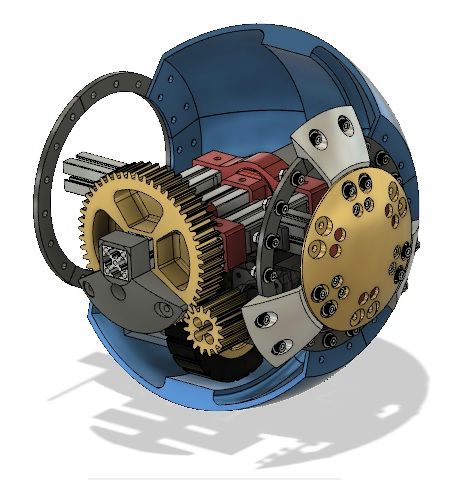
今のところ前後進用に一つ、左右旋回用に一つの計2つのモーターを使って移動を行う予定です。前後進ついてはタイヤ使って直接外殻を駆動、左右旋回については大き目なバラスト(錘)を使って、本体を傾むけることで旋回制御を行う予定です。言葉ではよくわからないですね・・。細かいところはおいおい紹介していきたいと思います。
で今回はこれら駆動系にかかわる部品を支える内部のフレーム(骨格)部分を作ります。
3Dモデル
3DCADはFusion360を使ってます。
▼駆動系全体のイメージ▼
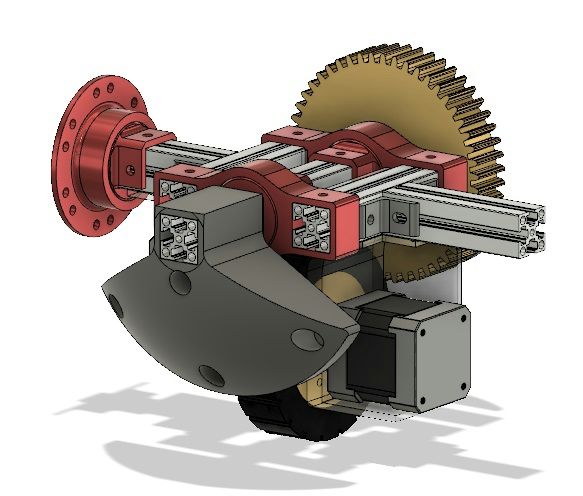
アイソメ図 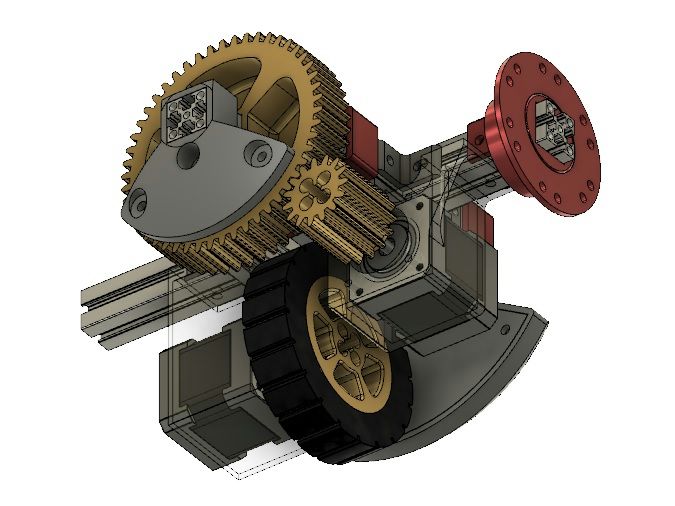
斜め下から
絵だけではわかり難いですが、今のところのイメージはこんな感じです。
▼フレーム部分▼
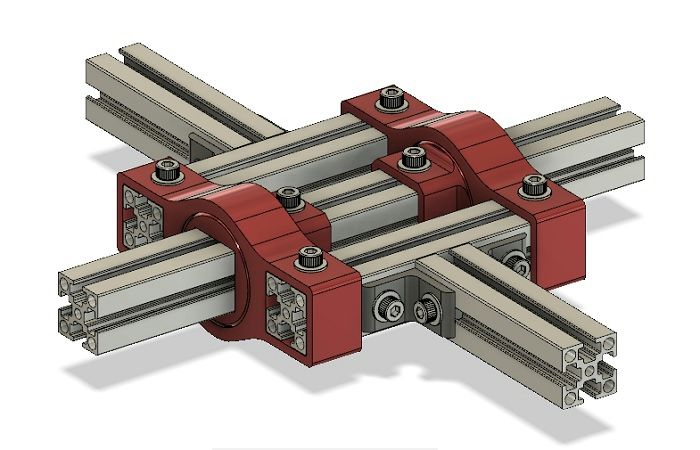
駆動系全体を支えているフレームです。フレームにはアルミ(構造材)を使用してます。
フレーム自体を3Dプリンターで出力しても良かったのですが、アルミ構造材自体が割と安価なのと強度面の心配も減るので、骨格となる部分はアルミ材で行くことにしました。

▼軸受け部▼
赤色部品は軸受けの構造をとってあり、中心のアルミ材に回転自由度をとれるような構造にしてます。最終的にこのフレームにバラスト(錘)ぶら下げて、錘の傾きでRoll方向の回転(傾き)を制御する予定です。
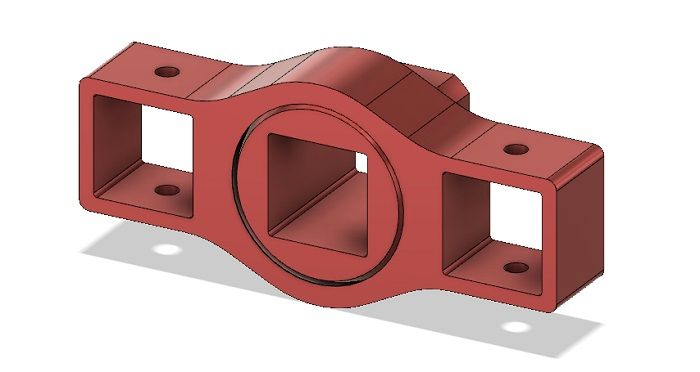
▼軸受け断面▼
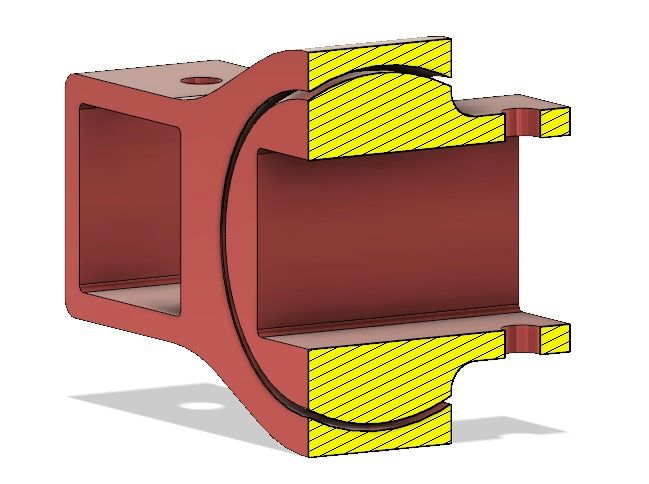
軸受けは3Dプリンターで出力します。球形状で、関節をイメージして回転するようにしてます。3Dプリンターで出力するため、極力単純な構造で最低限軸受けの動きができればいいかな、、という感じのモデリングしてます。
こちらで転がり軸受け(ボールベアリング)をイメージした試作品も作ってみたのですが、少し形状が大きくなってしまうので却下してます。
3Dプリンターで軸受けの出力
実際に3Dプリンターで出力して動きを確かめてみました。
若干動きが渋いですがまぁイメージに近い感じです。なんとか軸受けにはなりそう・・・。もう少しクリアランス詰めても良かったかも・・。PLAに合うグリスとかあるのかな? この軸受けを2個準備します。
▼あと既製品のアルミ構造材とL字ブラケットを準備▼

フレーム部を組立ててみました。先ほどの3Dプリンター製の軸受けと組立てます。
▼組立て▼
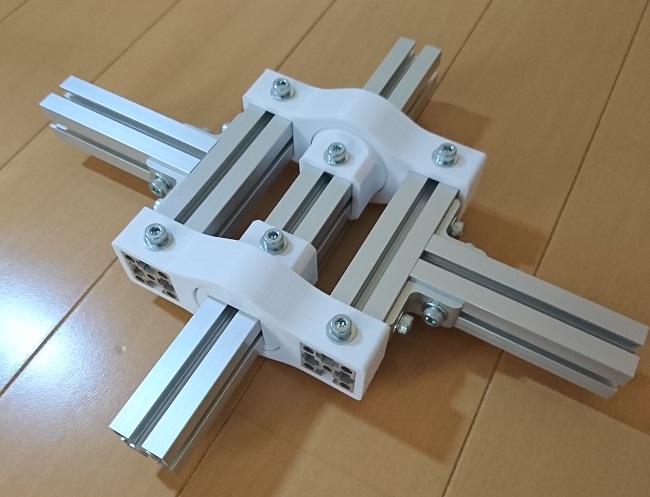
3Dプリンターの出力精度も良く、きっちり組み上がりました。真ん中のフレームも計画通り割とスムーズに回転します。
ただ、あまり組立てのことを考慮していなかったため、結構組み上げるのが難しかったです、、。アルミフレーム内の四角ナットを位置固定するためのホルダーがあるのですが、一緒に入手して置けばよかったです。
今後、このフレームにいろいろな物をぶら下げて行く予定。3Dプリンター品の機能部強度が少し心配です・・・。が今回の軸受けのように好きな形状、大きさなどなど、オリジナル部品が作れるというのは非常に便利ですね。
コメント