
Arduinoでクローラーロボット(戦車ラジコン)の作成です。
よくある題材ですが、キット物などを使用せずハード・ソフトともになるべく自作で作成予定。今回から少しずつ製作過程をまとめていく予定です。
▼これまでの製作記録はこちら▼

今回は3DCadで設計中の3Dモデル(3Dレンダリング)の紹介が中心です。(画像クリックで拡大します)
▼クローラーロボットのイメージ▼

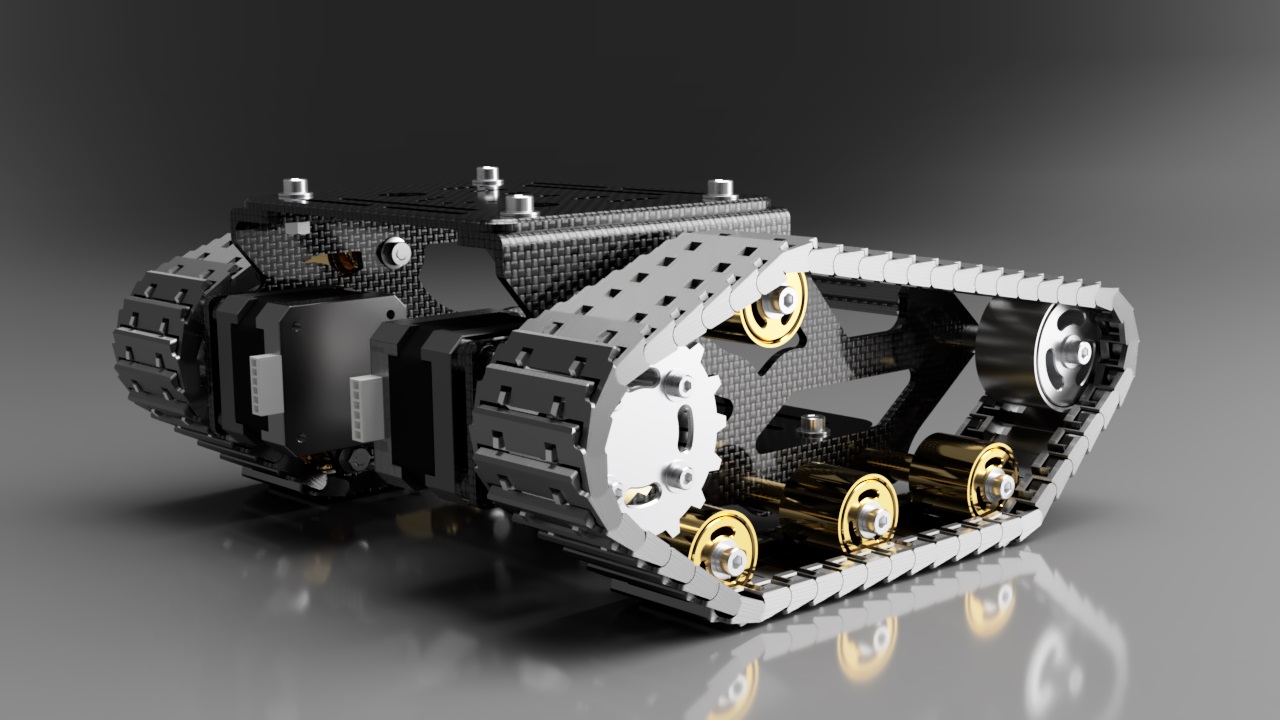
まだ完成してませんが、全体イメージはこんな感じのいわゆる戦車もどきです。電子部品、バッテリー、ねじ以外、筐体のほとんどは3Dプリンターで作成する予定。なので3Dプリンターで造形できるような構造を考慮しながら設計(モデリング)してます。
▼クローラー(キャタピラ)とスプロケット▼
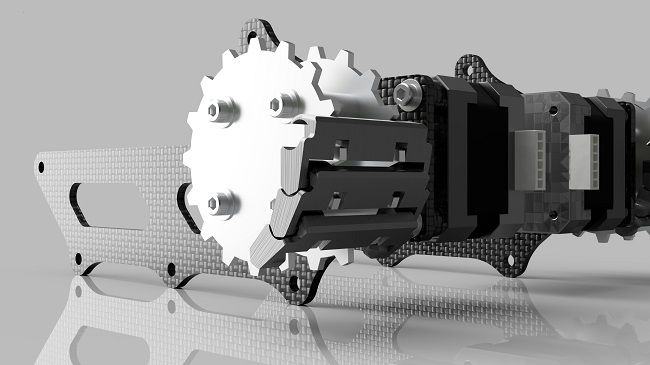
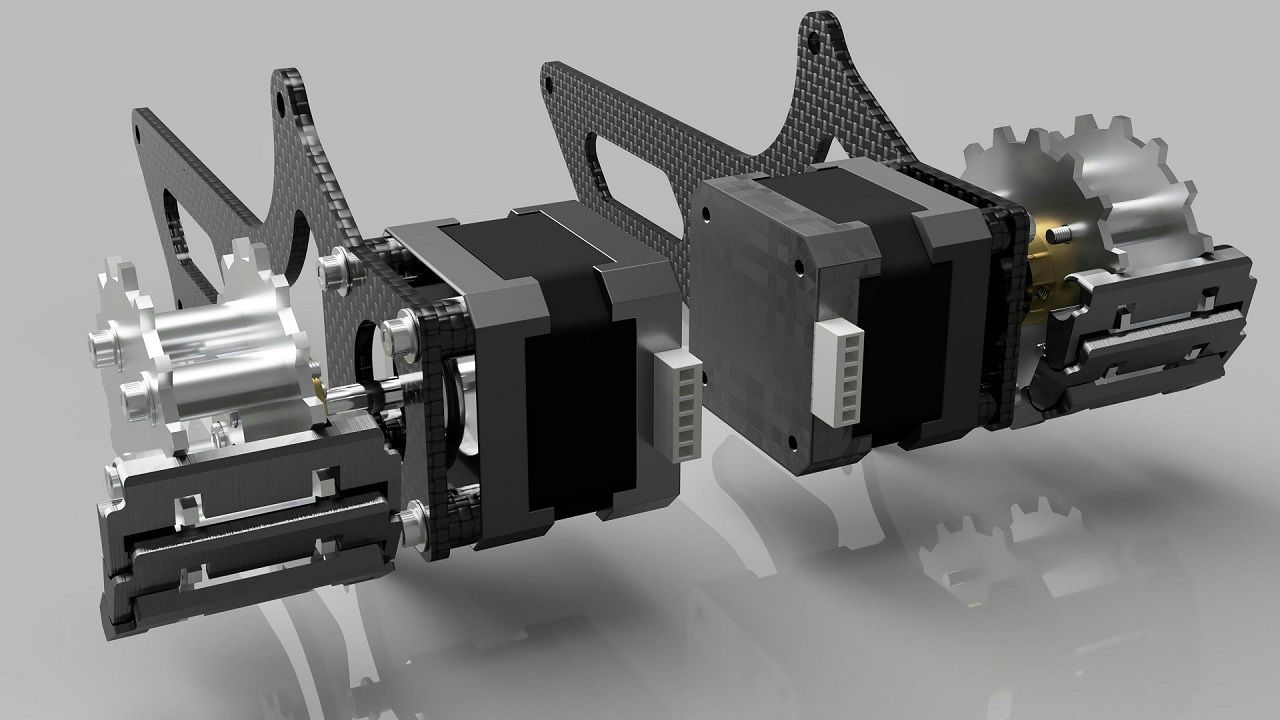
一般によく聞くキャタピラというのは商標のようですね。駆動するスプロケットは起動輪とも言うみたいです。ステッピングモーターと直付けの構想。
歯とクローラーのピッチ合わせるのが難しいです。とりあえずで設計してますがうまくいくかどうか心配。
▼ホイール▼

3Dプリンター品では構造が難しい・・。ベアリングのようなものをイメージしてます。
▼フレーム▼
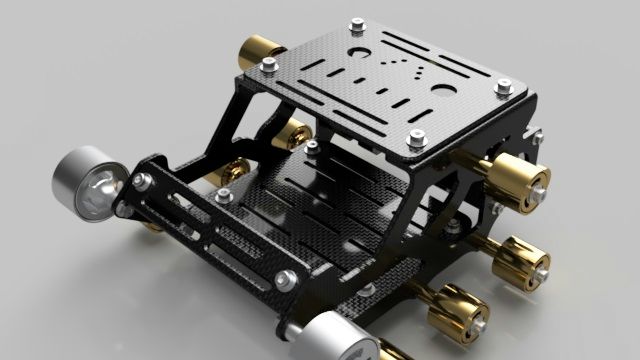
制御基板、バッテリー、などなど、、いろいろ乗っける予定。ここの部分は設計が進むにつれて変わっていくと思います。
構想段階なので製作していきながら変わるかもしてませんが、大体の構想はこんな感じ。その都度、製作過程を紹介していくつもりです。
最終的にはいろいろセンサーやGPSとか載せて走行をモニタリングできるようにしたり、カメラ乗っけてFPV(一人称視点)で操作できるようにもしてみたいと思ってます。
あぁ記事読み返してて気付いたのですが、構想設計で割と大きな欠陥ありますね。いきなりモデル修正せねば・・。
▼こちらで3Dモデル、回路図(ソース)を頒布してます▼

▼これまでの製作記録はこちら▼
コメント