

久しぶりにドローン(クアッドコプター)の自作です。だいぶ間延びした製作スピードですが、ちょっとずつ前に進めてます。
今回は弐号機のフライトコントローラー(ハード)を作成しました。
壱号機のときはArduino/Genuino101をベースにフライトコントローラーを作ってました。「101」には6軸センサーやBluetooth(BLE)が内蔵されていいたので、ほとんど「101」のみでフライトコントローラーとして機能していたのですが、今回はArduinoUNO(ProMini)ベースで作成します。
▼回路図というか結線図はこんな感じです▼

6軸センサー(加速度、ジャイロ)、気圧センサー、GPS、超音波センサーを、通信はBluetoothモジュールを搭載。各センサー類などはモジュール品を使用しているので、基本は電源系統と信号ラインを繋ぐだけです。
- 6軸センサーで機体姿勢を推定
- 気圧センサーと超音波センサーで高さ(高度)を推定
- GPSセンサーで水平位置を推定
でこれらの情報をArduinoで処理して各モーター回転数を決定(制御)してESCへ送信するといった「予定」です。「2.」と「3.」の2項目が弐号機で追加する制御になります。
▼で作成した基板▼
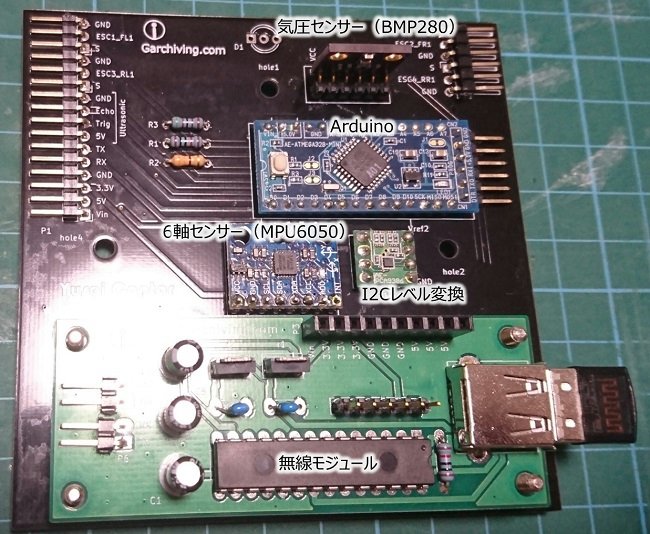
最初はユニバーサル基板でがんばろうとしたのですが、思ったより配線が多くて大変そうなのでチャレンジもせずにあきらめました・・・。各センサー類つないでいるだけの基板起こして搭載してます。
残念なことにGPSを忘れてしまって・・・。ちょっとゆったりすぎたかな。まぁ試作基板ということで・・、検証終わって気が向いたら作り直したいと思います。
▼機体に載せたところ▼
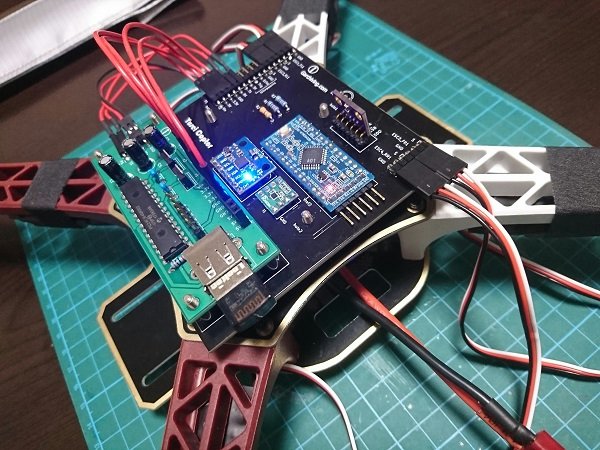
超音波センサーは機体の下側に搭載する予定なのであとで空中配索します。まず通電確認したかったので残りの配線は適当に繋いでます。
とりあえず今回は通電確認だけ。今後はソフト(制御プログラム)に取り掛かっていく予定です。壱号機のときと違ってかなり処理内容が増えるのでUNOでやりきれるかが心配です。
コメント