 Quad Copter(ドローン)
Quad Copter(ドローン) ドローンの自作|テスト飛行②(屋外)
自作ドローン(クアッドコプター)のテストフライト2回目です。 (これまでのドローン製作記録はこちらに纏めていってます。) 姿勢制御プログラムを修正して、屋外でテスト飛行してみました。なかなか近所で飛ばせるところが無くて、ようやく見つけた場...
Quad Copter(ドローン)  Quad Copter(ドローン)
Quad Copter(ドローン)  小ネタ Quad Copter(ドローン)
小ネタ Quad Copter(ドローン) 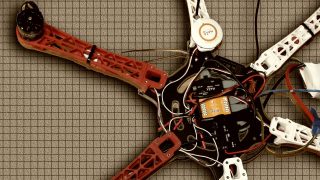 Quad Copter(ドローン)
Quad Copter(ドローン)  Quad Copter(ドローン) Quad Copter(ドローン) Quad Copter(ドローン) Quad Copter(ドローン)
Quad Copter(ドローン) Quad Copter(ドローン) Quad Copter(ドローン) Quad Copter(ドローン)  Quad Copter(ドローン)
Quad Copter(ドローン)