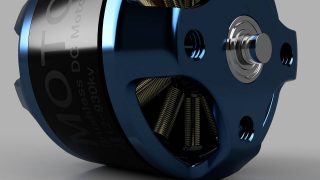
3D CAD 3DCAD(Fusion360)でブラシレスモーターをモデリング 3DCAD(Fusion360)でブラシレスモーターをモデリングしてみました。現物をもっていないため、いろいろなサイトで構造、材質や寸法などを調べながらモデリングしてます。ブラシレスモーターを使ったことが無いため、今回は作図を楽しみながら構... 2017.03.18 2 3D CAD
Quad Copter(ドローン) ドローンの自作をArduinoベースで構想 クアッドコプター(ドローン)の制御基板(フライトコントローラー)を、Arduinoを使用したシールド基板風で検討中です。検討している基板を3DCAD(Fusion360)でモデリングもしてみました。 実際に製作開始しました。ドローンの製作記... 2017.03.10 2 Quad Copter(ドローン)
3D CAD 3DCADでプロペラとモータをモデリング 3DCAD Fusion360を使用して、前回はArduinoをモデリングしましたが、今回はプロペラとコアレスモーターをモデリングしてみました。 作図したコアレスモータはこんな感じです。▼コアレスモーター▼ 8mm×20mmのコアレスモータ... 2017.01.30 0 3D CAD
小ネタ ジャイロのドリフト補正を改良 ジャイロのドリフト補正を改良してみました。6軸センサー(ジャイロ、加速度センサー)から姿勢角を算出する際、ジャイロドリフトを加速度センサーから算出した姿勢角で補正してなるべく正確な姿勢角を算出すると思います。 ただセンサー自体に加減速があ... 2016.11.07 7 小ネタ
小ネタ ジャイロのドリフト補正と比較(カルマン、相補フィルター) ジャイロのドリフト補正方法がいろいろあるようですが、比較的情報の集めやすいカルマンフィルターと相補フィルター(簡易)の実装と簡単な比較検証、ドリフト補正の効果確認を行ってみました。 2016.06.12 0 小ネタ
小ネタ 加速度センサーから角度の変換計算方法 加速度センサーの取得値(重力ベクトル)から角度の計算方法を簡単に解説します。最後はサンプルプログラムから姿勢角度算出の動作確認をしてみます。 2016.06.07 3 小ネタ
 3D CAD 3D CAD
3D CAD 3D CAD  Quad Copter(ドローン) 3D CAD
Quad Copter(ドローン) 3D CAD  小ネタ
小ネタ  小ネタ
小ネタ  小ネタ
小ネタ