
3DプリンターとArduinoでクローラーロボット(ラジコン戦車)の自作です。
前回、足廻りの動作確認が完了し、うまく動きそうなことが確認できたので今回は、いっきにハード部分を完成させてしまいたいと思います。(これまでの製作記録はこちら)
右側半分だけだった足廻りの残り半分(左側)を作ります。完全に左右対称なのでただひたすら3Dプリンターで作るだけです・・。
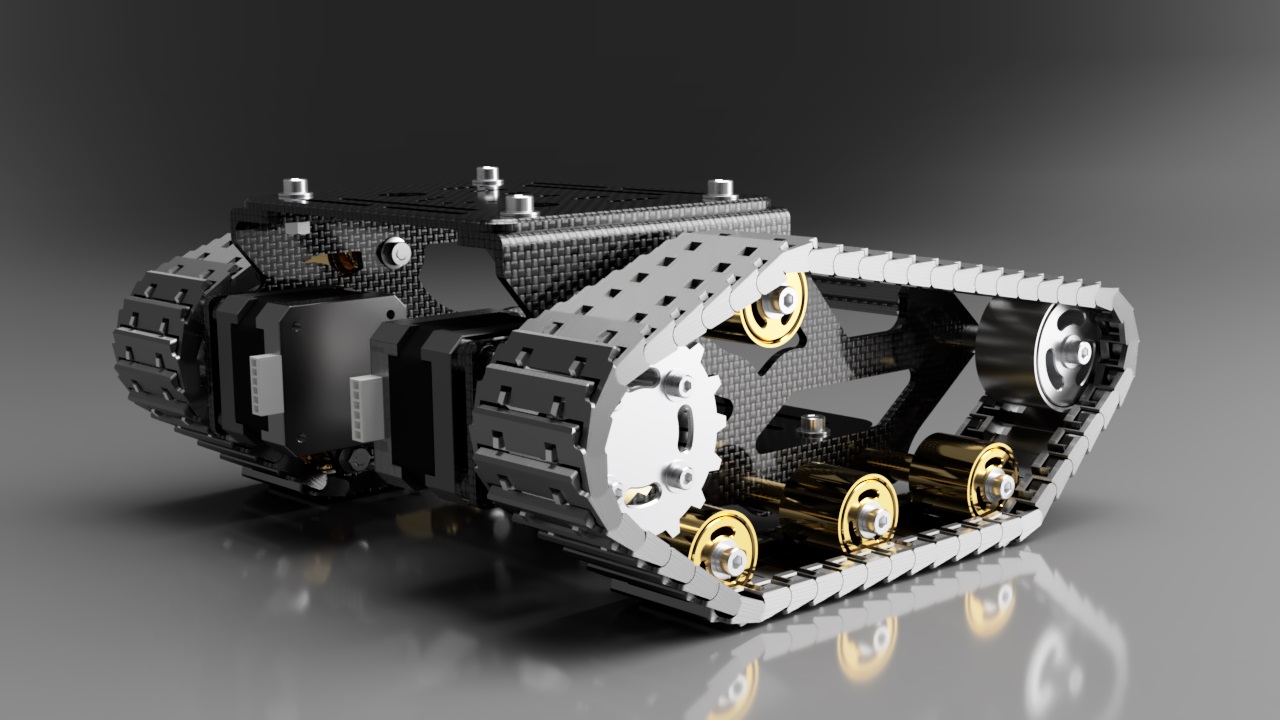
▼で完成した足廻り▼
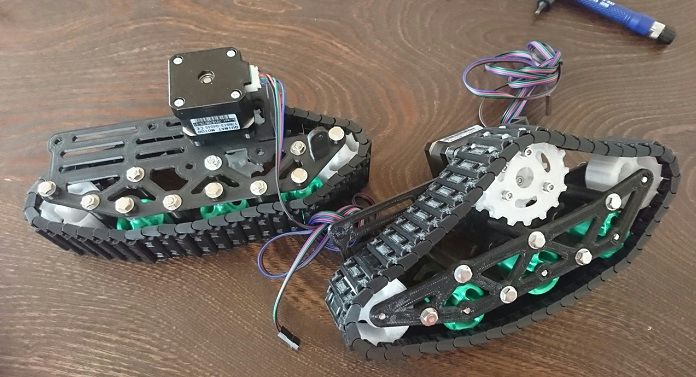
2つ合わせると思ったより重たい。この左右のクローラー(キャタピラ)を繋ぐ部品を作ります。
▼3Dモデル▼
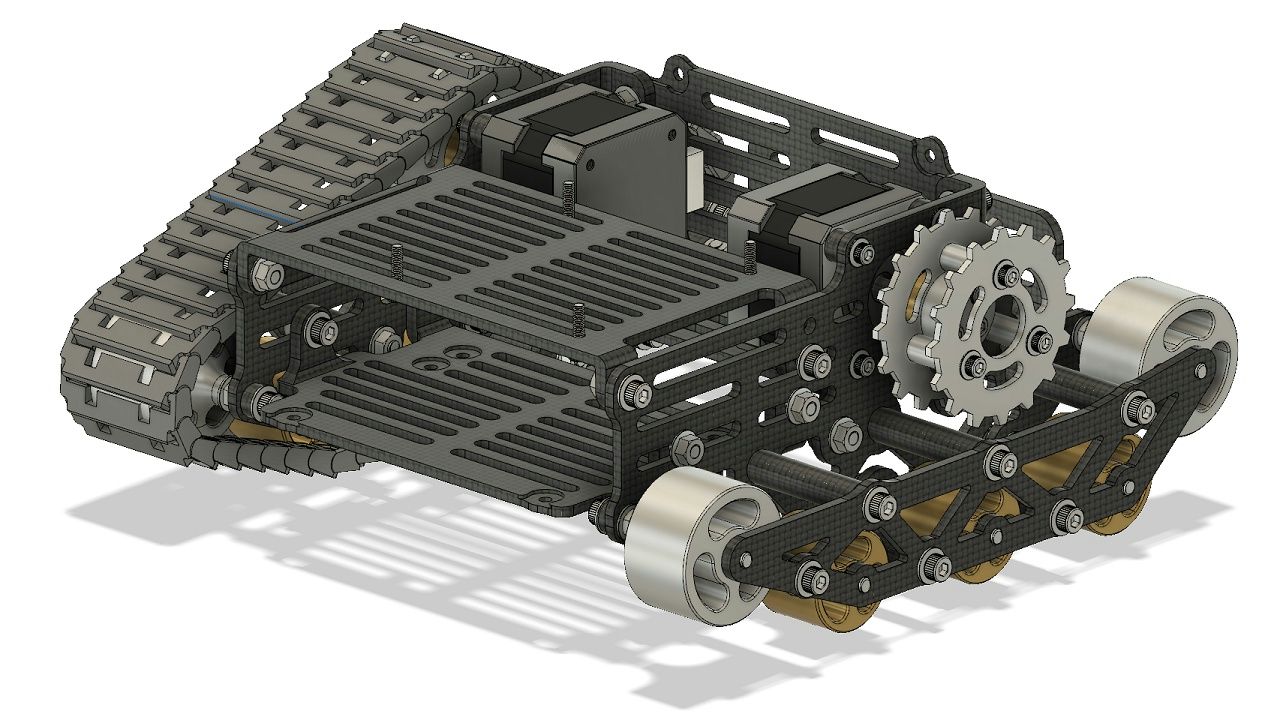

平板っぽいブラケットを何枚か作成してそれで左右の足廻りを繋ぎます。
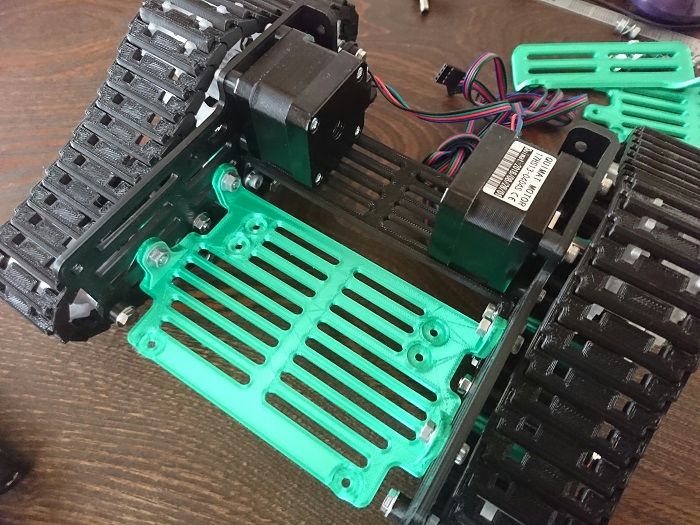
▼3Dプリンターで出力▼

色に意味はありません。全部PLAで出力。
▼組付けていきます▼
▼ここにメインの制御基板載せます▼
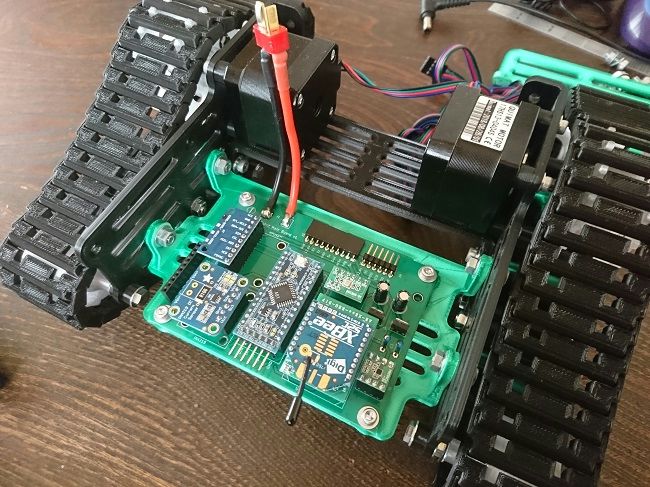
昔作った制御基板を少し改造して載せてます。Arduino+XBee(無線)+手持ちのセンサー類(電流・電圧・地磁気・加速度・ジャイロ・気温・気圧・湿度)を載せてます。あとそのうち、超音波センサーとGPS、それからカメラ乗っける予定ですがここら辺はおいおい・・。
▼背面側▼
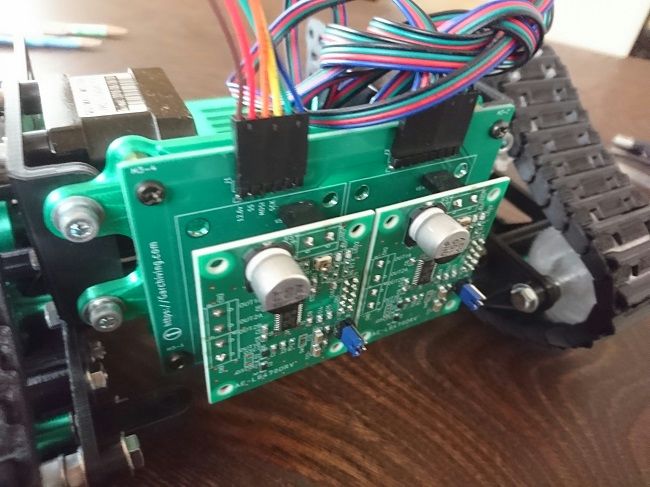
ここにはモータードライバーのっけます。L6470モジュールですが大きい・・。
これで大きなハード部分は完成です。細かい所は今後も引き続き修正していく予定。
▼これまでの製作記録はこちら▼

コメント
着々と作られてますね。このページ見て、クローラーまで作れる実力を知り3Dプリンターを最近購入してしまいました。クローラーロボットの造形が美しくて虜になってます。動く姿を楽しみに待ちますね。
まつさん、サイト拝見下さり有難う御座います。
3Dプリンターいいですよね。いい時代になりました。
進捗遅いですが、お付き合い頂き有難う御座います。