ボール型ロボットの自作です。今回でハード部分はだいたい完成です。今回はバラスト(錘)を3Dプリンターで作成します。(これまでのボール型ロボットの製作記録はこちら)
概要
バラスト(錘)で本体の左右バランス(傾き)を制御して本体の左右旋回を行う予定です。
▼前進・後退▼

本体の回転自体は内部中心にあるタイヤで行います(前進、後退)。回転中(前進中)に本体を傾かせて、左右に旋回するという考え方です。上手くいくかわかりませんが、バイクのハングオンみたいなイメージで旋回できないかな、と考えてます。その本体の傾きを錘を使って行う予定。
錘の3Dモデル
▼全体構造▼
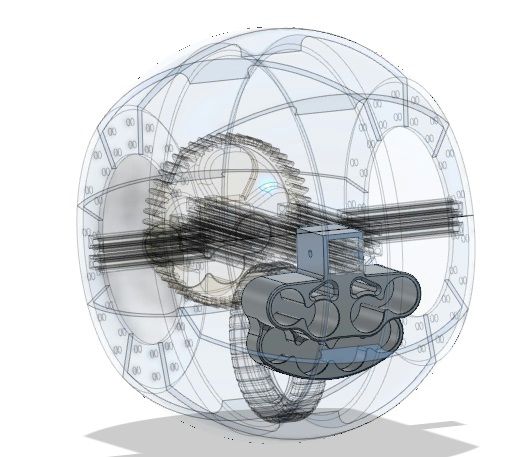
真ん中の回転自由度を持ったフレームに錘をぶら下げます。 フレームごとステッピングモーターで回転させて旋回させます。 丸く空いた所に硬貨を詰め込んで重さのバランスとります。
▼反対側の錘▼
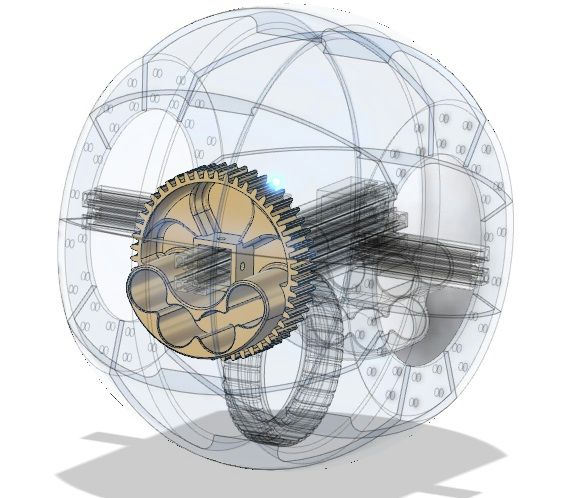
反対側は、フレームを回転する(傾ける)ための歯車をそのまま錘にします。
本体全体の重さに対して少し重さが頼りない感じですが、スペースに余裕が無いため取りあえずこれで様子見です。
3Dプリンターで出力して組立て
形状自体はそれほど難しくないため、3Dプリンターの出力設定も普通です。前回作った歯車も、錘仕様にするため作り直しました。
▼搭載▼
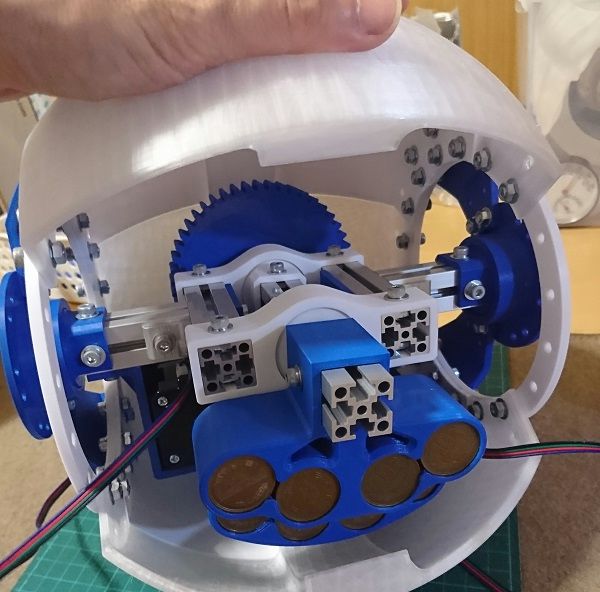
硬貨の中でも比重が高めの十円玉を詰め込んでます・・。 雰囲気うまくいきそうな感じはしますが・・・。動かしてみて様子見です。
さてこれでハード部分は概ね完成です。着手し始めてから半年以上も経過してしまってます・・・。次回はモーターへ通電してみて、簡単な可動確認してみたいと思います。
コメント