Arduinoで磁気浮上装置の自作です。コイルに流す電流をフィードバック制御(PID制御)して、実際に浮かす検証を行っていきます。
▼いきなり全部自作は難しいかと思ったので、まずはキットにArduino+モータードライバー繋いで検証してます。キットで手軽に検証、、と思ったのですがわりとカオスです▼

▲四方外側にネオジム磁石を配置して、実際に浮かしながらコイルを電流制御して浮上検証していきます。ただちょっと試してみたのですがいきなりの浮上制御は難しい。さらにすぐにコイルやらネオジム磁石に貼り付いてなかなか検証にならない。のでまた新たに治具を制作しました。
▼NEW治具▼

▲コイルでの位置制御検証に使っていた治具を少し改造。いきなり平面は難しそうなので、1軸方向で検証が行えるようガイド設けてます。
▼PID制御の概要▼
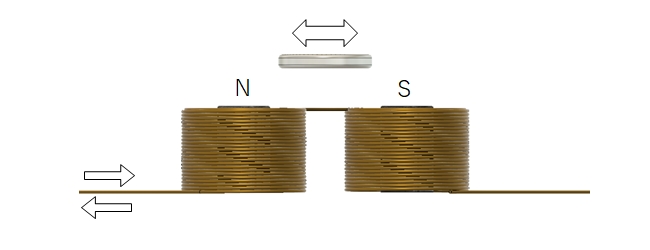
▲コイルは流れる電流が逆巻きになるように(極性があべこべになる方向に)直列で接続されています。そのため、電流を流すと一方は引力、一方は斥力となって、磁石は片方のコイルに引き寄せられます。ホールセンサーで磁石の位置を観測、位置に応じて流す電流の向き、大きさを制御することによって磁石を中央にとどめます。感覚ですが倒立振子の制御に雰囲気は似ているかも。
▼さっそくPID制御を組んで浮上試験▼
▲かろうじて浮いてます?が大暴れです。動画で分かり易くするために少し大げさに揺らしてますが、真剣にやっても結構振動してしまいます。パラメータは現物合わせで試行錯誤、、数時間向き合いましたがなかなか安定浮上できません。。
ただいろいろとデータが取れたのと、いくつか気になるところが分かったので、少し回路とプログラムを改良して再チャレンジです。
▼磁気浮上装置まとめ▼

コメント