
本格的にArduino倒立振子の作成に入ります。
今回は主に筐体(本体)を作成です。筐体の主な部品は3Dプリンターでの出力品です。(製作記録はこちらにまとめてます)
でさっそく3DCadで設計したモデルです。
3DCadモデル
▼倒立振子の3Dモデル▼
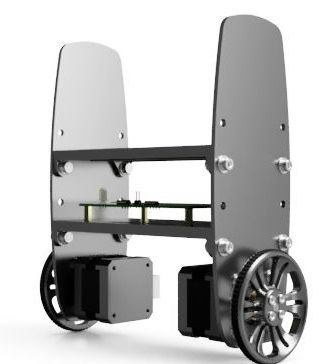
▲最終的にはコントローラーで旋回するとか、ラジコン風にしたいので2個のステッピングモーターで各々制御できるタイプに。モーターの上段に基板を置いて、さらにその上の段にLipoバッテリを搭載する予定です。
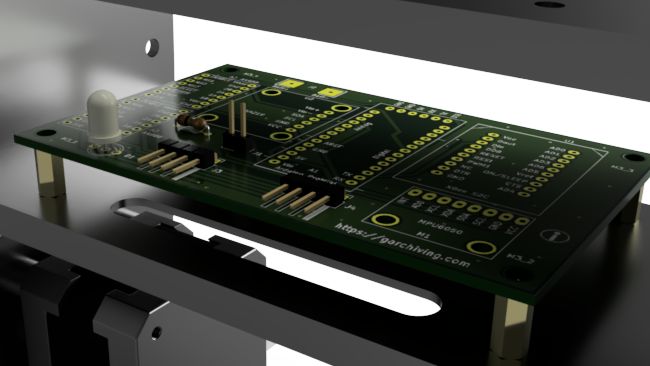
▲回路基板も3DCadでモデリングしてみました。。最近知ったのですが、Kicadから3dモデルをSTEP出力できるようで、この種の3Dモデリングが非常に楽になりました。ここまでモデリングする必要ないんですけどね。ただの自己満足です。

▲タイヤ。地面との接地部はTPUフィラメントでそれ以外がPLAフィラメントで作成する予定です。
3Dプリンターで出力
さっそく3Dプリンター出力してみました。
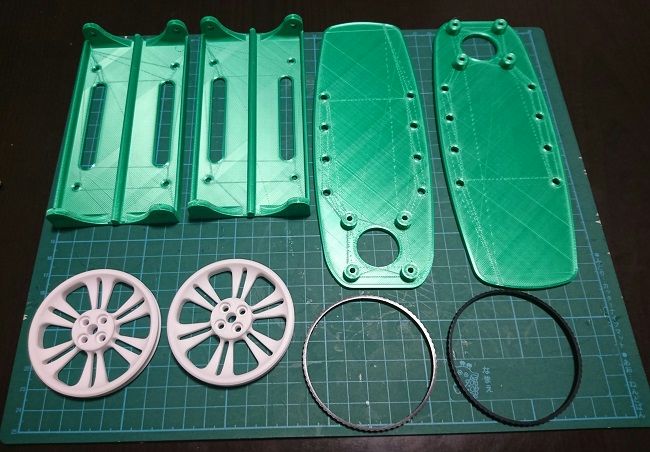
▲部品点数(8点)も少ないのでたいした時間かかってません。延べ45時間くらい・・。
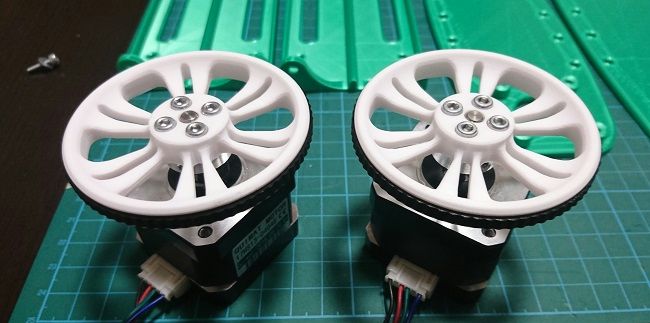
▲ステッピングモーターとくっつけた車輪部分です。黒い部品がTPUフィラメント(柔らかい素材)で白い部分はPLAフィラメントで作成してます。グリップを気にしてTPUフィラメント使用したのですが思いのほか効果がないです・・・・。
組立て
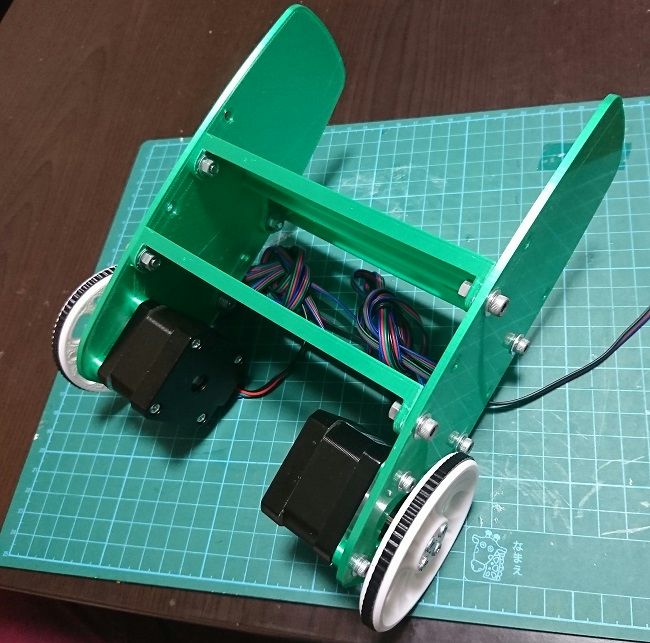
基本はボルト&ナットで組立てです。とりあえずはイメージ通りに完成。
全体が単純(簡単)な3Dモデルだったので造形には関係の無いモーターやら回路基板やらと割と細かい部分まで 、(今回も) 3Dモデル化してます。個人的趣味で設計にはあまり意味ないんですけどね。
さて次は回路基板に取り掛かります。(製作記録はこちらにまとめてます)
コメント