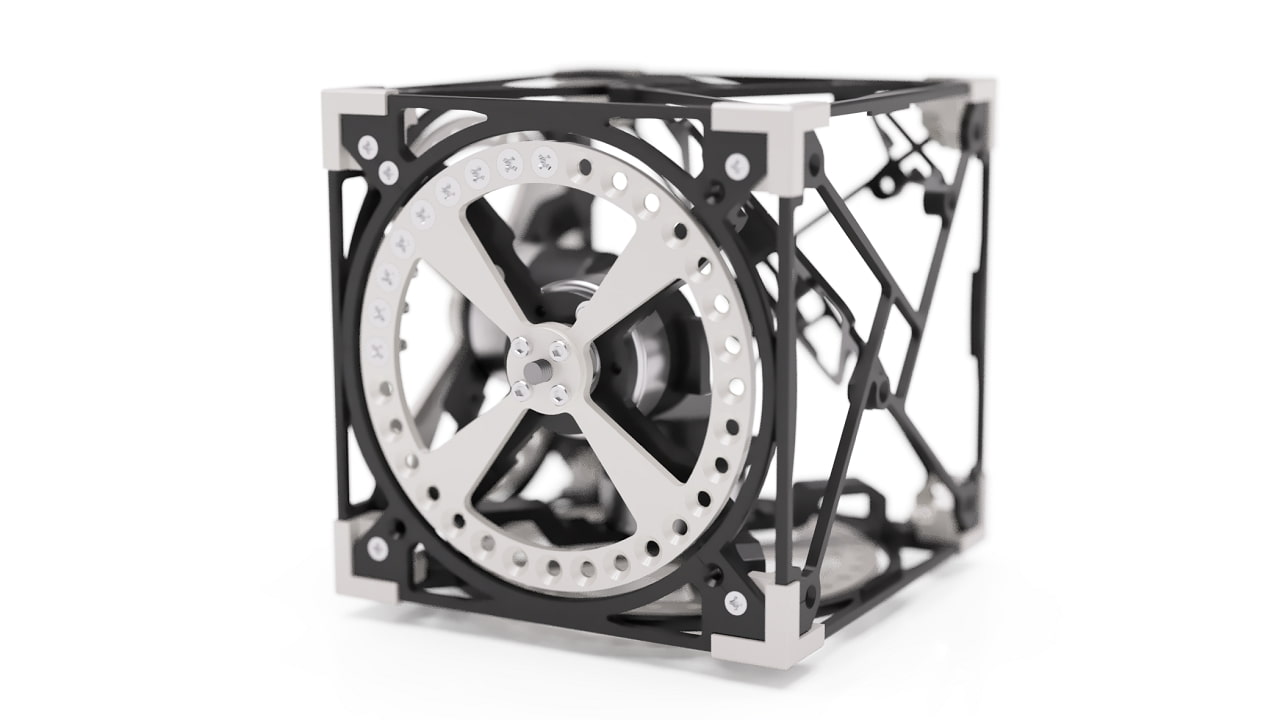
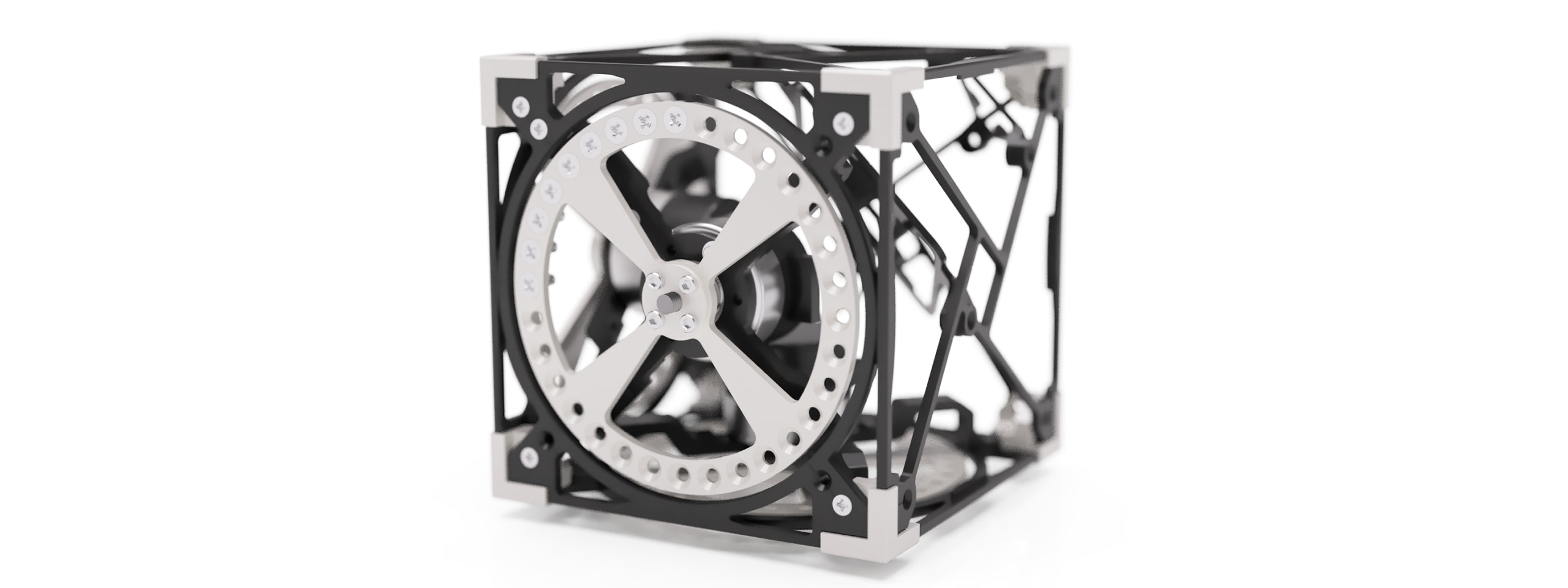
2号機がようやく完成。
1号機に比べてひと廻り小型化(□150mm⇒□136mm)。制御プログラムも見直してずいぶん安定した気がします。点倒立(平面xy)に、回転制御(z軸)も加えて、3軸姿勢制御の完成です。2号機もレシピも頒布開始しました。
作成記事
- 構想
- モーター選定① ステッピングモータ
- モーター選定② ブラシレスモーター
- 1軸倒立振子のハード作成
- エンコーダーでモーター回転数を計測
- モータの回転と角度検出のテスト
- モータの回転数を推定
- 1軸倒立振子ロボットの完成(アルミフレーム版)
- 筐体設計その① リアクションホイールの再設計
- 筐体設計その② 筐体角の固定方法検討
- 筐体設計その③ 半分完成
- 回路基板の作成
- 基板のフレーム作成(筐体完成)
- 6軸センサーから角度算出
- 1辺(1軸)の倒立振子(CUBE版)
- 3軸による点倒立制御
- スタンドアローン化
- 2号機の検討開始
- 2号機の組立て①
- 2号機の組立て②完了
- 2号機の筐体を改造
- 2号機の1軸倒立(1辺倒立)
- 制御プログラム修正(モーター回転数抑制)
- 2号機完成。姿勢制御方法の解説
レシピ頒布
作成した3Dモデル/回路図/ソースなどをnoteサイトおよびBOOTHサイトで頒布してます。
noteサイト

BOOTHサイト
▼参考サイト▼
[電子工作]リアクションホイールへの道-HomeMadeGarbage
remcr-GitHub
Balancing cube-willem-pennings GitHub