
リアクションホイールによる3軸姿勢制御モジュールの自作です。ようやく1軸(1辺)での倒立制御が成功しました。今回はその製作過程とPID制御についての内容です。

概要
ようやく1軸(1辺)での倒立振子制御完了。
LQRとかもチャレンジしてみたのですがなんかうまくいかず、PID制御でゴリゴリに現物合わせしてます。結局入力は「角度(角速度)」情報のみ、電流値やモータ回転速度もリアルタイムで検出してますが制御には一切使用せず(できず)といった感じです。
今回はここまでの内容を紹介です。
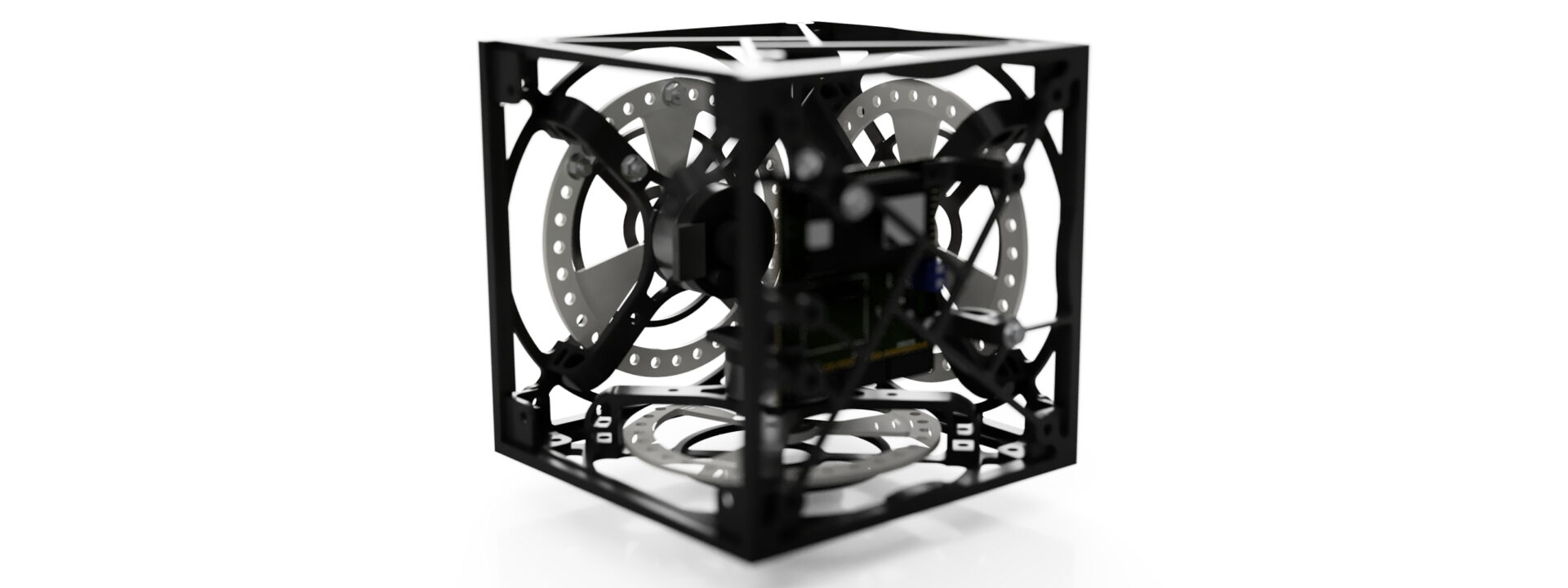
ハード完成
前回で基板まで取り付け完了。残りのモータ、ホイールを取付けて筐体完成。

あとバッテリ搭載する予定のフレームが未設計で残ってますが、とりあえず安定化電源でモータ駆動するので最後のフレームは後回しです。
でさっそく制御検討していたら、ホイール高速回転中にフレームと接触、

フレームのガード部分が見事に破壊されました。
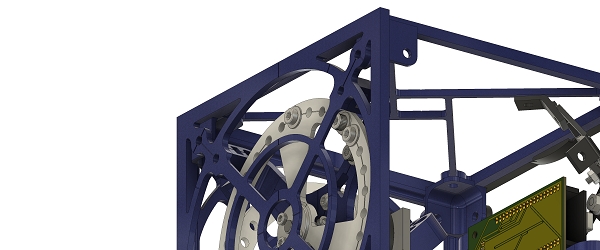
ホイールとフレームのすれ違いスキを3mm程で設計していたのでが、可動部分なのでもう少し必要でした。3Dプリンタの強度と精度を過信しすぎてました。。直すのも面倒なのでこのまま制御検討の方に入っていきます。
PID制御の調整
まず、単純に倒立振子の時の制御プログラムでテストしてみたのですが、やはりいろいろバランスが変わっていてそのままでの倒立は無理。ゲイン調整しやりなおしです。
▲ホイール重量調整とゲイン調整して短時間であれば何とか倒立している感じ。反応が遅いような気がして倒立が中々継続しない感じです。このまま調整詰めていっても何とかなりそうでしたが、少し試したいことがあったので制御内容見直します。
角度制御ではなく角速度制御にプログラムを変更。
角速度PID制御の外側に角度P制御の2重ループにしてます。昔、ドローンの制御プログラムを作成したときの方法です。効果があったのかわかりませんが調整代のストライクゾーンがだいぶ広くなって割と雑に調整しても安定感が出しやすくなった気がしないでもないです、、。もう少し詰めれそうですがとりあえずは十分な倒立制御ができました。
電流値やモータ回転速度も取得しているのですが、結局フィードバック制御には使えずじまい、、。角度情報(加速度、角速度)のみで倒立制御してます。次からは3軸制御(点倒立)の検討と思ってましたが少し筐体改造すれば2軸制御もできそうなので、また少し寄り道します。。
コメント