

姿勢制御に使うリアクションホイールに使用するモーターを選定中です。前回はステッピングモーターを試してみましたが、今回はブラシレスサーボモーターの使用感を試してみます。
▼ステッピングモーターテスト▼

入手したブラシレスサーボモーター

前回のステッピングモーターと外観はそっくり。コネクタは8ピンでドライバ(駆動回路)とエンコーダーが内蔵されてます。シャフトがはすば歯車?。
全体がかなり汚れていてシャフト廻りには何か削り粉のようなものが付着してます。何かから分解して取り出したような感じです。商品紹介には記載があったので中古品なのは承知済でしたが、思ったより使い古し感があります。
ピン配置
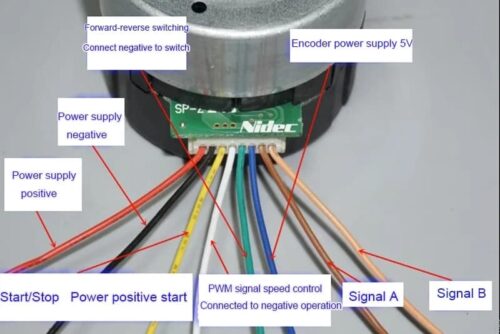
商品ページからの写真。英語ですがなんとなくピン割当てはわかります。
▼ピン配置▼
| ピン番号 | 内容 |
| 1 | モーター電源。6.6V以上で回転 |
| 2 | GND |
| 3 | 回転/停止 |
| 4 | 回転速度(PWM信号) |
| 5 | 正転/逆転 |
| 6 | エンコーダー用電源5V |
| 7 | エンコーダー A相 |
| 8 | エンコーダー B相 |
写真の左側1ピン~です。
▼届いたモーター▼

配線色は商品紹介と全く合ってません。いいんですけどできれば電源色の赤黒テレコ避けてほしかった。説明にも電源とGNDは絶対に間違えるなと記載があったのですが紛らわしいです。Nidecとロゴがあります、、。
エンコーダーの稼働テスト
まずはエンコーダーの稼働テストを行ってみました。エンコーダー用の配線だけ繋いで確認してます。
シャフトを手回しでA相/B相の出力を確認。前回テストしたステッピングモーターではエンコーダー出力が全く反応しなかったのですが、こちらのモーターでは問題無く回転数を検出できそう。
細かなところは後日確認するとして、エンコーダーは一般的な仕組みで動いてそうです。
モーターの回転テスト
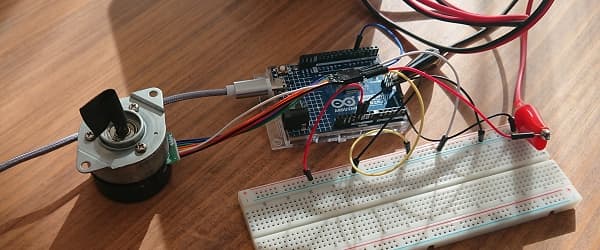
モーターへは安定化電源から電圧負荷。回転制御はArduino UNO R4から信号送信してます。
スケッチ
#include "pwm.h"
PwmOut pwm5(5);
void setup() {
pwm5.begin(100, 0); //周期 100us = 10kHz; パルス幅 0us = 0%
pwm5.pulse_perc(25.0); //duty 25% = 25us
}
void loop() {}
ただPWM出力しているだけのスケッチ。5番ピンから10kHz、デューティー比25%のPWM出力してます。R4用のスケッチ。R3ではたぶん使用できません。
▼UNO R4 でPWM出力▼

稼働確認
問題無く回転しました。手動で正転/逆転の信号を切り替えてます。デューティー比で回転速度が変わることも確認。
ただ、速度制御はデューティ比を0%に近づけると回転速度がアップ、100%で速度が遅くなり私の感覚と逆の仕様となってました。
まとめ
前回テストしたステッピングモーターと違い、きちんとエンコーダーも動くしPWM制御で速度制御も可能。割といい感じのモーターなんですがシャフトがはすば歯車となっていたり、中古品だったり、と少し気になる所があります。
他、いろいろブラシレスで探してみたのですがあまりいいものが見つからず、、。結局、入手性が良くて融通の利きやすそうな普通のDCモーターでいったんは検討を開始してみようかと考えてます。

コメント