リアクションホイールを使った倒立振子ロボットの自作です。最終的には3軸姿勢制御が目標なのですが、いきなりは難しそうなのでまずは1軸の倒立振子でリアクションホイールの勉強から開始です。まずはハード(筐体)部分を設計。
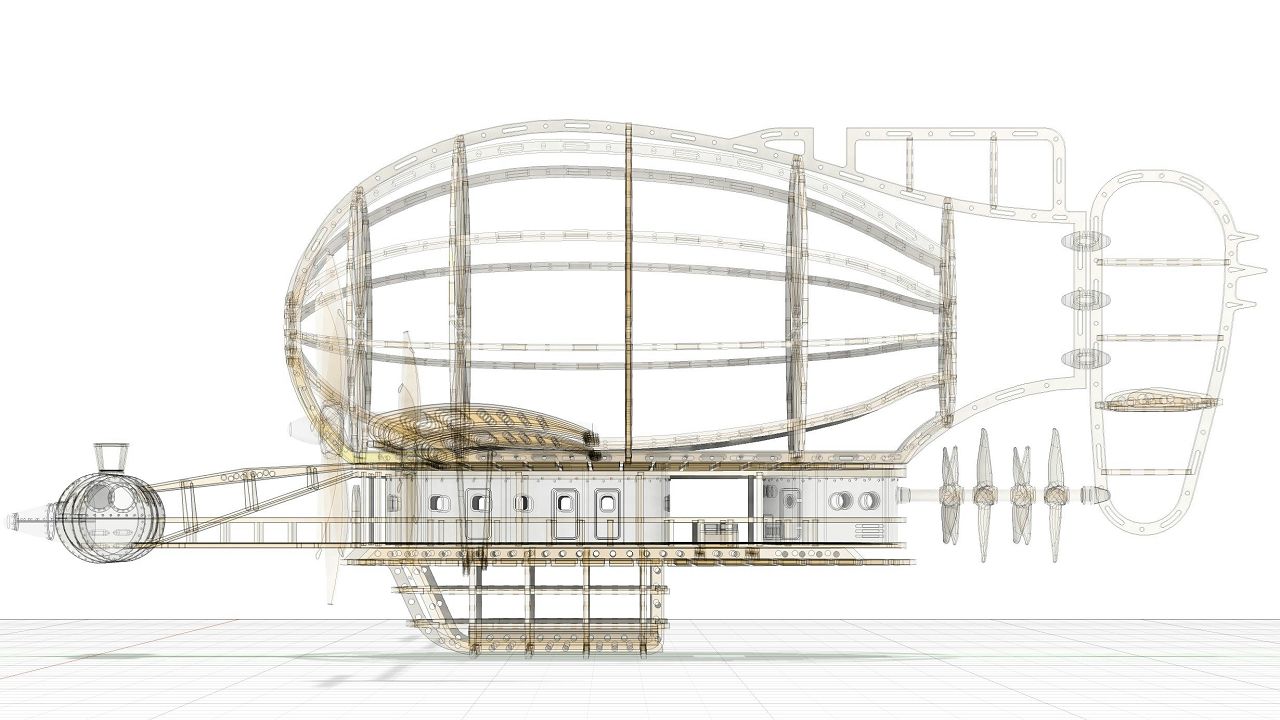
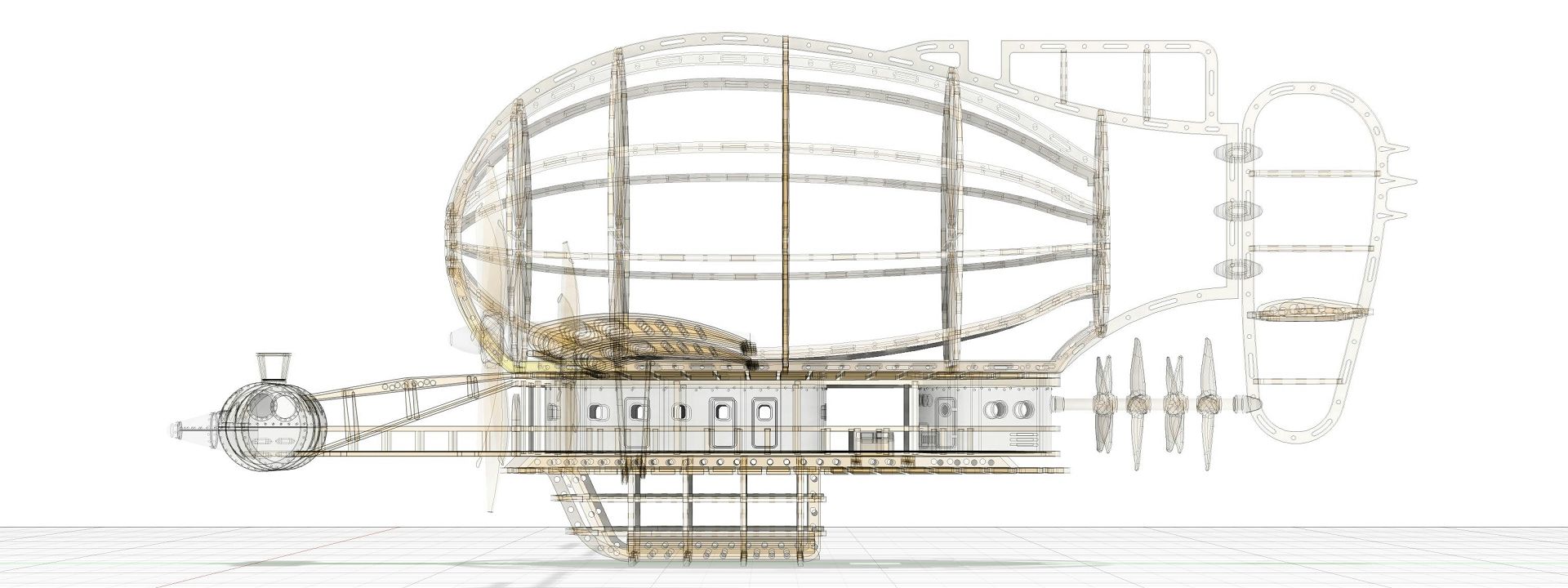
3Dモデル
筐体の多くの部分は3Dプリンター品で準備する予定。、もととなる3Dモデル(データ)を準備します。
全体
リアクションホイールの動きをいろいろ勉強したいのでまずは土台で動かないようにしてます。最終的にはこの土台を外して倒立振子にする予定。骨組みはアルミフレームを使用。他は3Dプリンターで準備します。
モーター固定部分
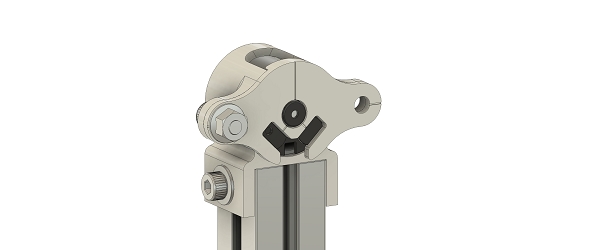
DCモーターをアルミフレームと固定するモデルです。最初は端子(電線)部分に穴を設けてたのですがメンテナンス最悪なので穴を繋ぐように作り直しました。
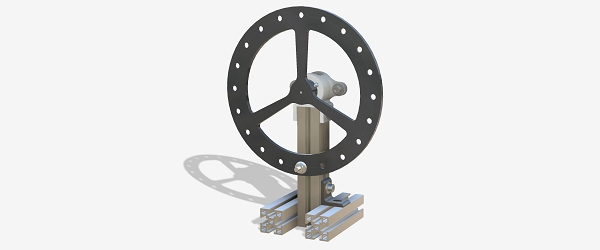
フライホイール

リアクションホイールを3Dプリンターで作成している先人の方がちらほらいて参考にさせてもらってます。樹脂だけでは軽いので慣性を調整できるようボルト&ナットを付けれるようにいくつか穴を開けてます。
▼参考▼
3Dプリント
3Dモデルから部品を出力していきます。

モータマウントを出力中。材質はPLA。1部品1~3時間くらいの造形時間。

設計ミスや3Dプリンター不調で何個か作り直してます。3Dプリンター購入してから5年経過。メンテしながら使ってますがそろそろ限界なのか、使用している材料が1年以上たっている古い物のせいなのか、今回は結構失敗が続きました。

モーターマウント完成。中身はDCモーターです。

ホイール(フライホイール)。モーターシャフトとの固定ねじ穴(M2)ですが、3Dプリンターではねじ山整形する程の精度は出ないので、後加工でねじ切ってます。タップハンドルが入らなかったですが、樹脂が比較的やわらかいので何とか加工できました。

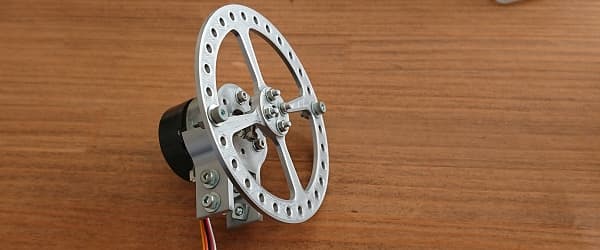
組立てて完成。脇にホールセンサー付けてますが、種類が悪かったのかうまく回転検出できなかったです、、。
稼働確認
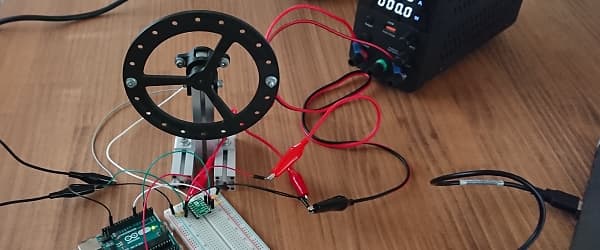
Arduino、モータードライバーをブレッドボードで配線繋いで簡単な回転テスト。

GIF動画なので少し分り難いですが動きは問題無いです。数秒置きに正転/逆転を繰り返してます。DCモーターだからなのか少しもっさりした感じの動き。
結局モーターの種類が決められなくて、BLDCモーターバージョンも作ってます。
検証用のハードが完成したので、今後はソフト廻りをいろいろ検証していきたいと思います。

コメント