

リアクションホイールで3軸姿勢制御モジュールの自作です。ある程度ハード設計に目途が付いてきたので今回は回路基板を作成発注。組立てまで行いました。

概要
▼3軸姿勢制御モジュールの回路図▼
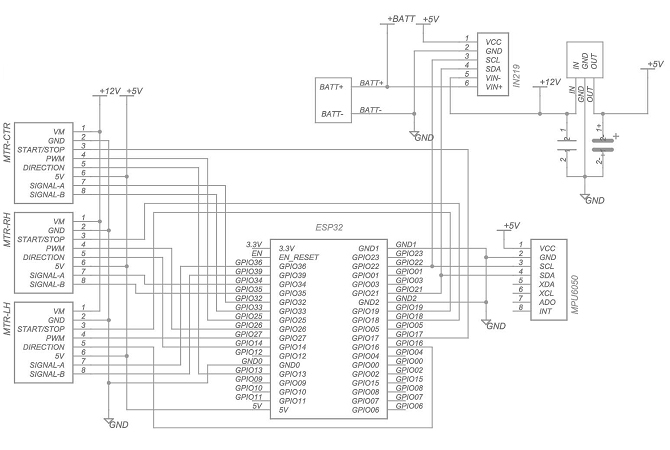
ESP32で各種センサ情報の取得とモータ3個の回転制御を行います。回路といってもモジュール品を結線してるだけ。ほんとはモータ1個ずつの電流値を計測したかったのですが、回路全体を計測してます。
あとユニバーサル基板で作ろうとしたのですが配線が想定よりも随分多くなってしまって、、、うまく作る自身が無いので久しぶりですが基板発注することにしました。
基板設計&発注
4~5年ぶり?くらいに回路CADを触りました。フリーでもなんでもできてほんと便利になってます。
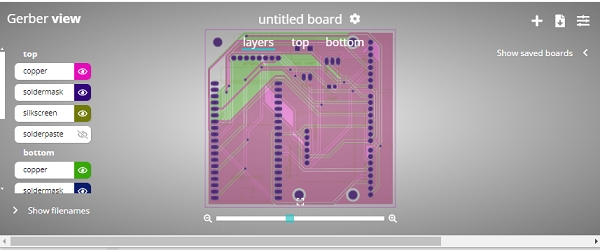
PCBGOGOのビューアでガーバーデータ見てるところです。問題無さそうなのでさっそく設計した基板をPCBGOGOで発注してみました。

▲届いた基板。送料込みで2ドル程度という安さで金曜発注で火曜日に届くという速さ。新規ユーザ登録のポイント特典で6軸センサ(MPU6050)ももらいました。なんかこんなに良くしてもらうと次もここで注文しなくちゃいけない気になり思うつぼです。
組立て

基板に部品をはんだ付けします。この作業が得意でなく苦手。たいした基板では無いんですが回路設計間違えてたり、部品間違えて付けてしまったり、ハンダでショートしたりとかいろいろ心配。
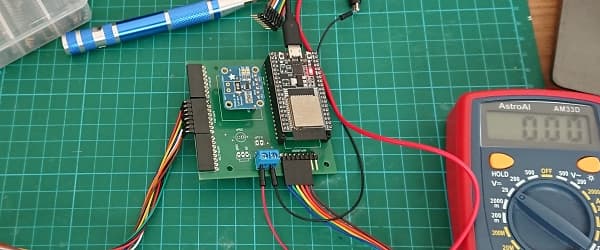
組立て完了して通電確認と簡単なプログラム書き込んで、センサ情報の取得やモータ回転の動作確認など、一通りテストして問題なさそうでほっとしました。。貧乏性なのでモジュール品は使い廻しができるよう全てピンソケット経由で取付けてます。
苦手な部分が完了。次はこの基板とセンサーを取り付けるためのフレームを設計・作成していこうと思います。
コメント