 Quad Copter(ドローン)
Quad Copter(ドローン) ドローンの自作|テスト飛行
ドローンの機体も完成し、Arduinoによる姿勢制御プログラム(アルゴリズム)もいったん完成したため、テスト飛行してみました。(これまでの製作記録はこちらに纏めていってます。)テスト飛行 安定したホバリングはなかなか難しいです・・・。とりあ...
Quad Copter(ドローン) Quad Copter(ドローン)  Quad Copter(ドローン)
Quad Copter(ドローン)  Quad Copter(ドローン)
Quad Copter(ドローン)  Quad Copter(ドローン)
Quad Copter(ドローン) 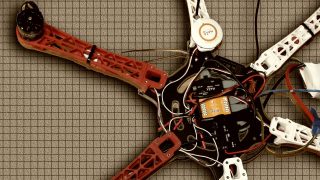 Quad Copter(ドローン) Quad Copter(ドローン)
Quad Copter(ドローン) Quad Copter(ドローン)  EXCEL
EXCEL  Quad Copter(ドローン) Quad Copter(ドローン)
Quad Copter(ドローン) Quad Copter(ドローン)