 電子工作(マイコン全般)
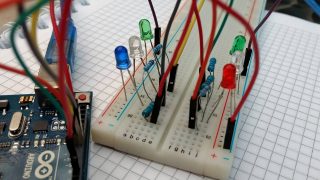
電子工作(マイコン全般) Arduino UNO R4でdigitalRead/Writeの高速化
UNO R4でピンの入出力(digitalRead/Write)を直接レジスタのビット操作をすることで高速化してみました。またその速度比較も行ってます。R3でも直接レジスタ制御して高速化するというのがありましたがそれと同様の内容です。ついで...
電子工作(マイコン全般) 電子工作(マイコン全般)  電子工作(マイコン全般)
電子工作(マイコン全般)  3軸姿勢制御モジュール
3軸姿勢制御モジュール  磁気浮上制御
磁気浮上制御  磁気浮上制御
磁気浮上制御  磁気浮上制御 磁気浮上制御 磁気浮上制御
磁気浮上制御 磁気浮上制御 磁気浮上制御  磁気浮上制御
磁気浮上制御