

随分前からクアッドコプター(ドローン)を自作してみたいと思っていたのですが、なかなか難しそうで、、、。少しずつですが構想から練っていこうかと思っているところです。
実際に製作を開始しました。製作状況はこちらに纏めていってます。
今ではある程度キットのようなものも販売されていますが、そういったキット物ではなく、できるだけ汎用部品のみで組み上げて自作してみたいと思ってます。
いまのところの構想
- フライトコントローラー:Arduino系使用。制御ソフトは自作。Arduino/Genuino101であれば6軸センサーとBLEが内蔵されているため検証が便利そう。Arduinoそのまま使用したら重すぎでしょうか?
- フレーム:できるだけ自作
- プロペラ:汎用品購入。できれば自作
- モータ:できればコアレスモータ、無理ならブラシレスモータ
- バッテリー:リチウムイオン系
- 送受信機:スマホかPC。アプリ(ソフト)は自作。通信はArduino101を使用する前提でBluetooth通信。
剛性、重量、モーター電圧、電流、回転数、推力、、、etc 検討すべき項目は非常に多く難しいかと思いますが、途中で挫折しないよう気長に取り組んでいきたいと思います。
とりあえずArduinoとコアレスモーター使用前提で制御部の回路図をざっと引いてみました。
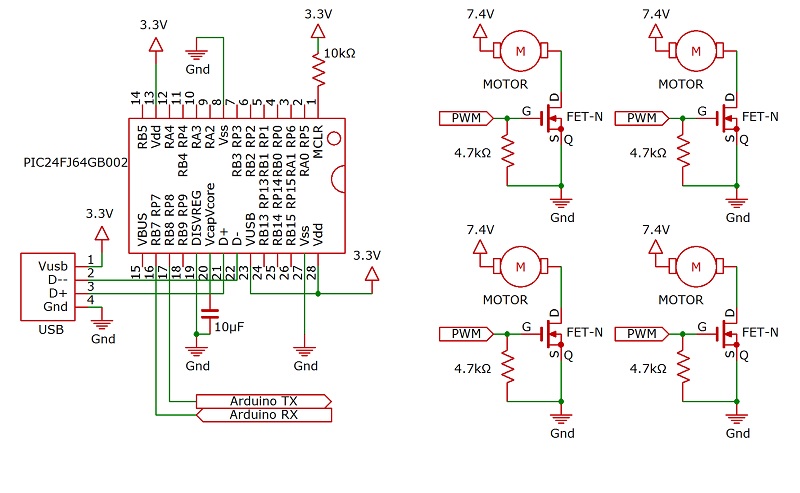
動作検証は一切していないので、もしか参考にされる方がいましたら注意して下さい。Arduino101使用すればBLEが内蔵されているのですが、BLEはなかなか難しいところがあります。ですのでPICマイコンとBluetoothトングルを使用して、送受信にSPP通信できるようにもしてます。
いきなり重すぎでしょうか・・・。まぁまだ構想段階ですのでいろいろ変わっていくと思います。あ~、コアレスモーター前提で7.4Vはきつそうですね。101使用前提だとPWM信号が3.3Vですし、、、。回路図見ながらこの投稿書いてたらいろいろ気づきました。ちなみに記事冒頭プロペラのイラストですが、3DCADで描いた自作のプロペラです。
先は長そうです。
ドローンの製作記録はこちらに纏めていってます。
コメント
はじめまして。
Quadcopterが出来上がるの楽しみにしています。
コアレスモータを使う場合、ブラシレスモータに比べ推力が出ないので最初にプロペラをつけて最大推力をざっくりと計測することをお勧めします。もし予算が確保できそうであればブラシレスモータを使い、FPVレースなどで使われている250サイズ程度から作っていくと確実かと思われます。最初から全て自作すると結構時間がかかってモチベーションなども下がってしまうので。
参考
・コアレスモータベースのQuadcopter
http://blog.eldhrimnir.com/wordpress/?page_id=4326
・FPVレース機体
http://www.immersionrc.com
Anon.さん
はじめまして。コメント、アドバイス有難うございます。
やはりコアレスモーターは非力ですかね。ブラシレスも視野に入れてみたいと思います。
URLも有難う御座います。参考にしたいと思います。(コアレスベース機体⇒軽いですね。)
飛ばす楽しみよりも飛ばすまでを楽しみたいと思っております。
気長にやるつもりです。また何かありましたらアドバイスなりお願いします。