 小ネタ
小ネタ Processingで残像を使ってレーダーっぽいものを描画
Processingでレーダー探知機っぽいものを作ってみました。 残像を描画するやり方は割といろいろなところでみかけるのですが、残像描画をレイヤーっぽく表現するやり方があまり紹介されていなくて・・。なかなか苦戦しました。 ▼Process...
小ネタ  Quad Copter(ドローン)
Quad Copter(ドローン)  Quad Copter(ドローン)
Quad Copter(ドローン)  小ネタ
小ネタ  小ネタ 小ネタ
小ネタ 小ネタ  小ネタ Quad Copter(ドローン) 電子工作(マイコン全般)
小ネタ Quad Copter(ドローン) 電子工作(マイコン全般) 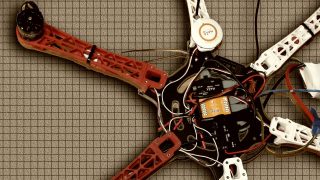 Quad Copter(ドローン)
Quad Copter(ドローン)