
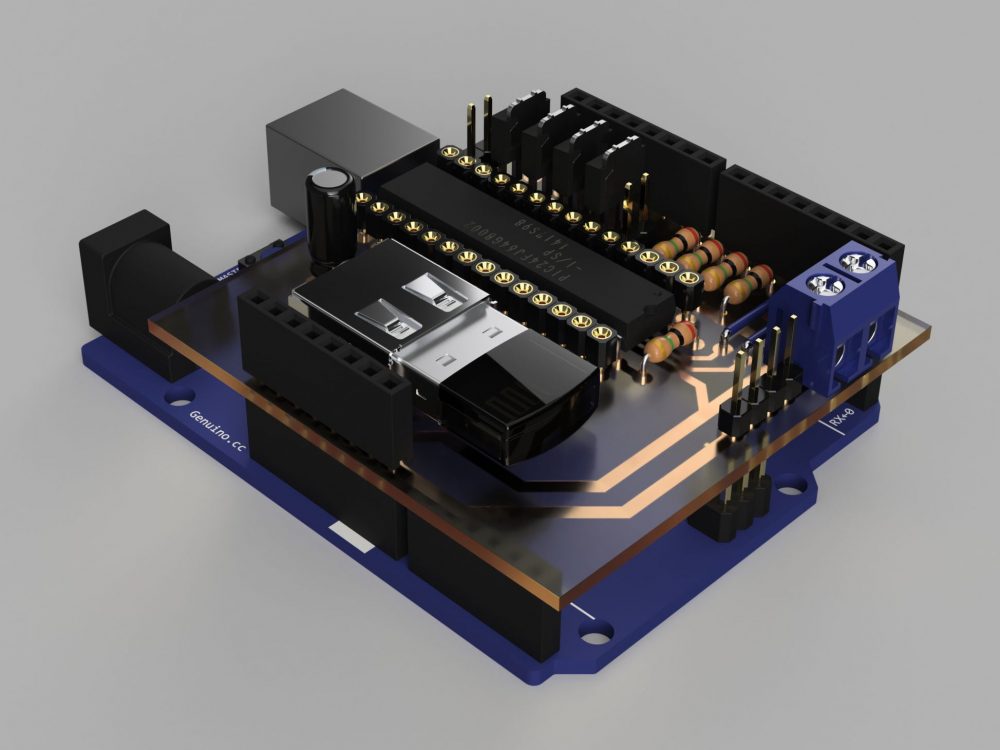
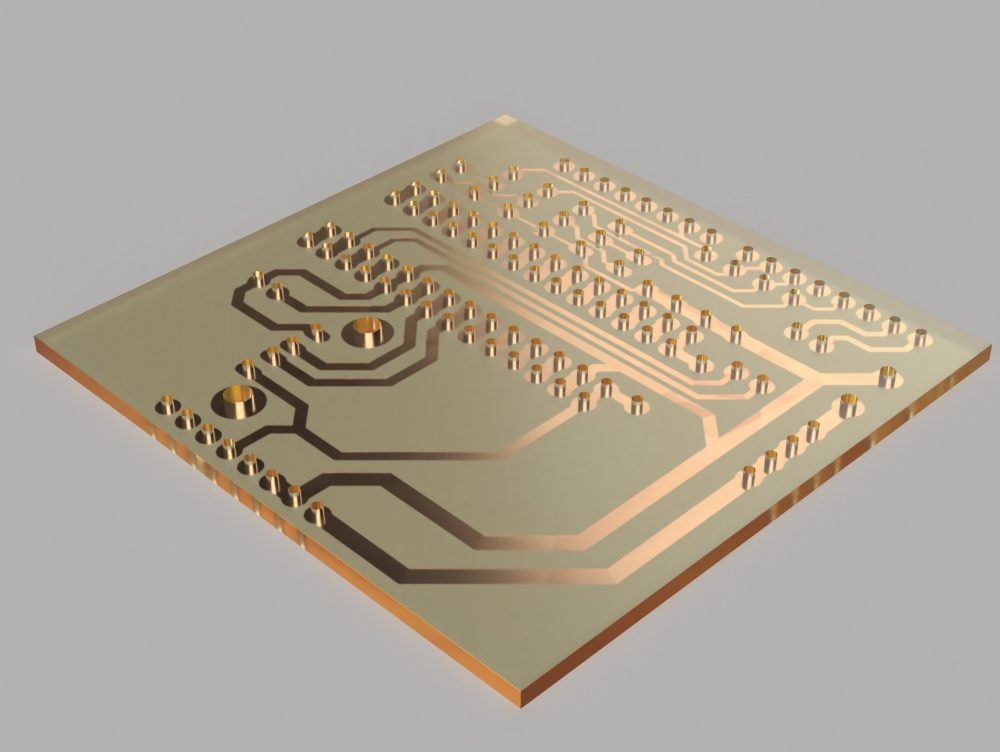
クアッドコプター(ドローン)の制御基板(フライトコントローラー)を、Arduinoを使用したシールド基板風で検討中です。検討している基板を3DCAD(Fusion360)でモデリングもしてみました。
実際に製作開始しました。ドローンの製作記録はこちらに纏めていってます。
▼検討中の制御基板、3Dモデル▼(画像クリックで拡大)
姿勢検出、姿勢(モーター)制御にはArduino101を使用。6軸センサーはArduino101に内蔵されているものをそのまま使用する予定。
Arduino101内蔵の6軸センサーは過去にいろいろ検証していて、クアッドコプターの姿勢検出にも使用できるとふんでます。(今のところ・・・。)
・6軸センサーの姿勢検出の可視化
・加速度センサーを使用したジャイロドリフト補正への影響
送受信部にはBluetoothドングルを使用するつもりです。Arduino101の内蔵BLEも過去いろいろ検証していて、ある程度使えるようにはなってはいるのですが、プログラムがスマホアプリでしか作れなくて、しかも遅い・・。Bluetoothドングルで少しわかり易いSPP通信で検討に入るつもりです。
・スマホからサーボモーターの制御(Arduino101内蔵BLE使用)
・スマホとArduino101の内蔵BLEで文字列送受信
検討している制御基板を3DCADでモデリングしてみました。
以下3Dモデルギャラリーです。
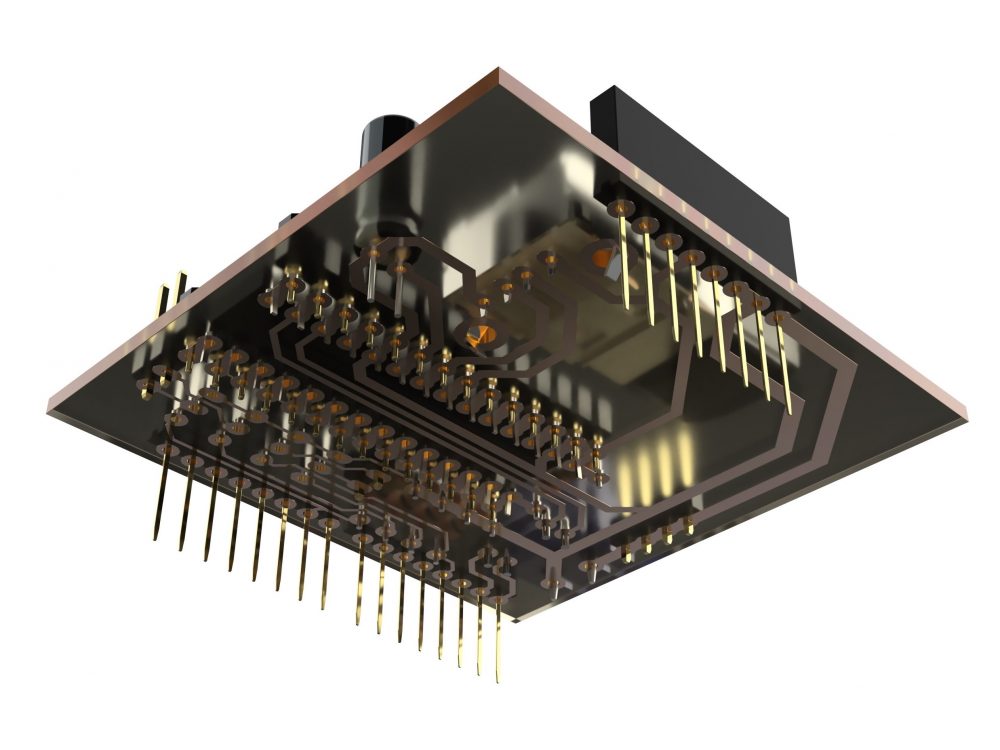
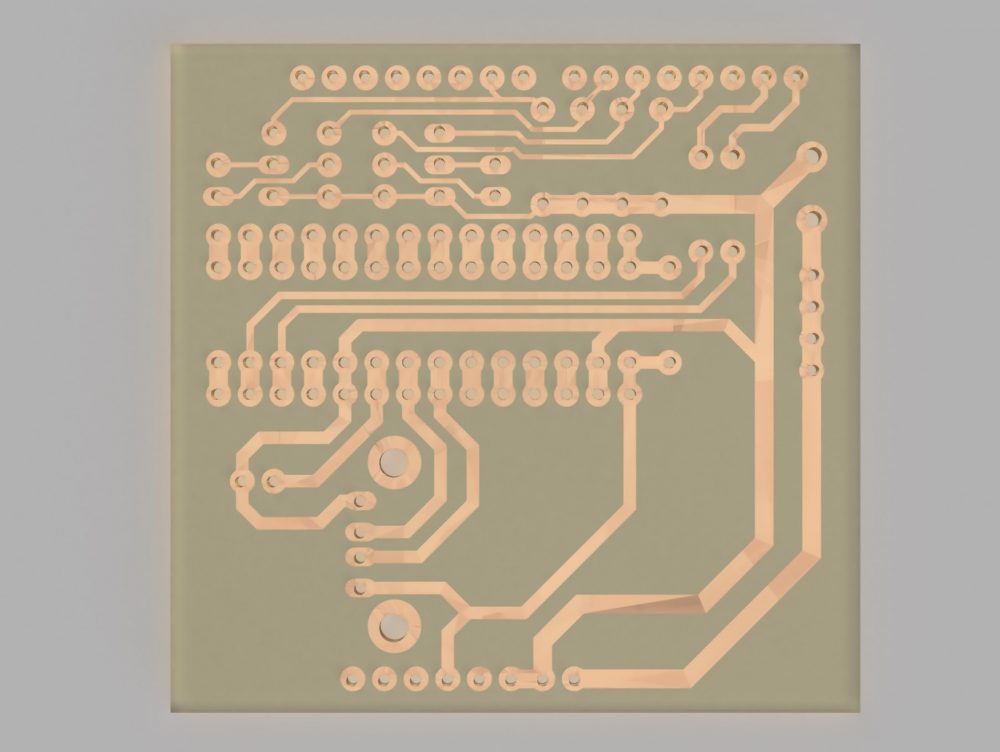
▼基板の3Dモデル▼(画像クリックで拡大)
-
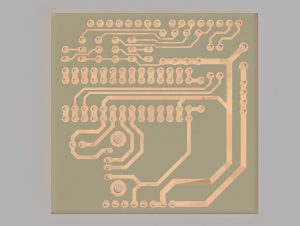
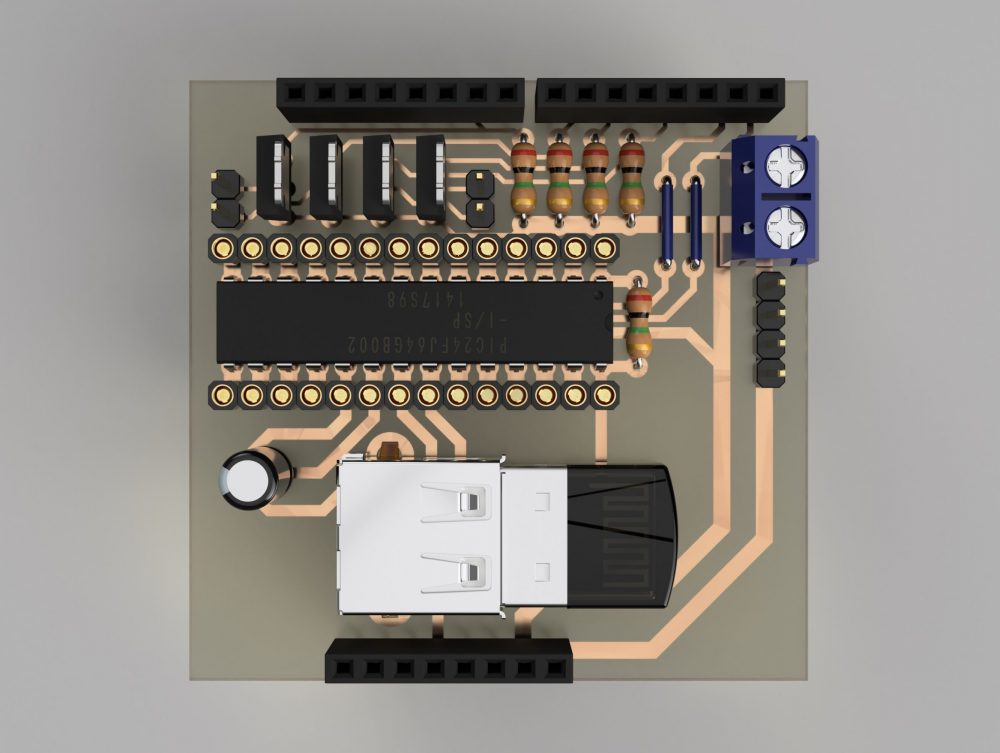
- 部品面(パターン透けてます)
-
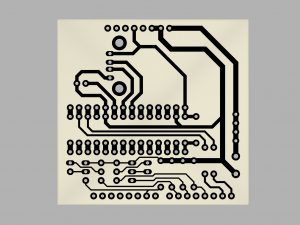
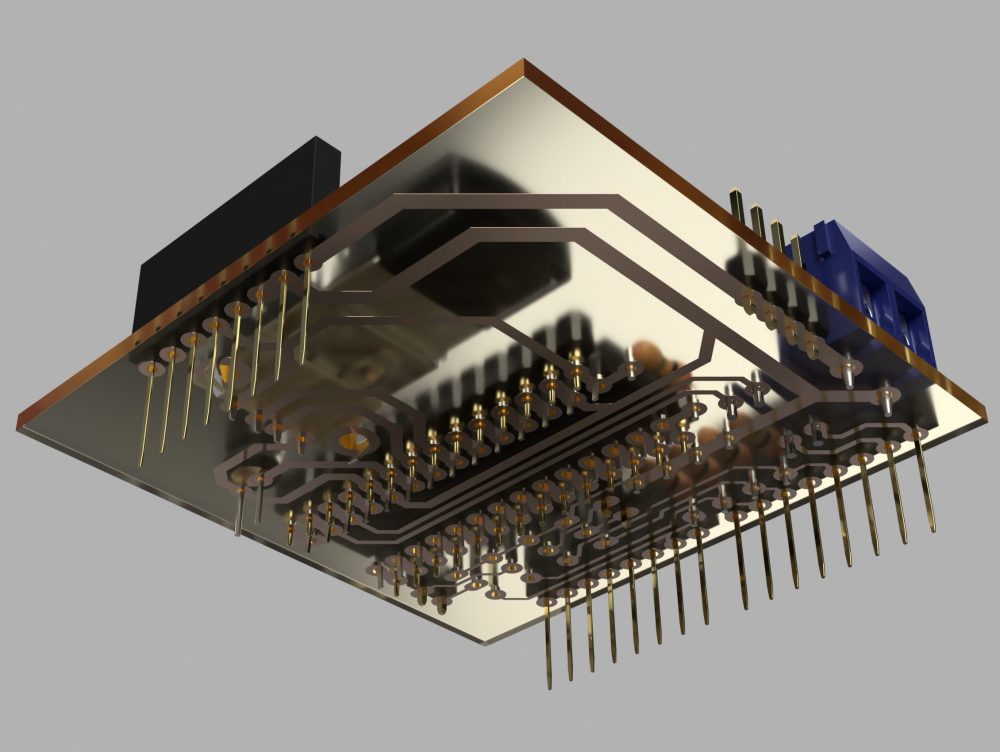
- パターン面

パターンが透けて見えるように、基材は琥珀色透明のアクリル系素材で表現してます。3DCADでパターンを描くのは面倒でしたが意外と書けます。
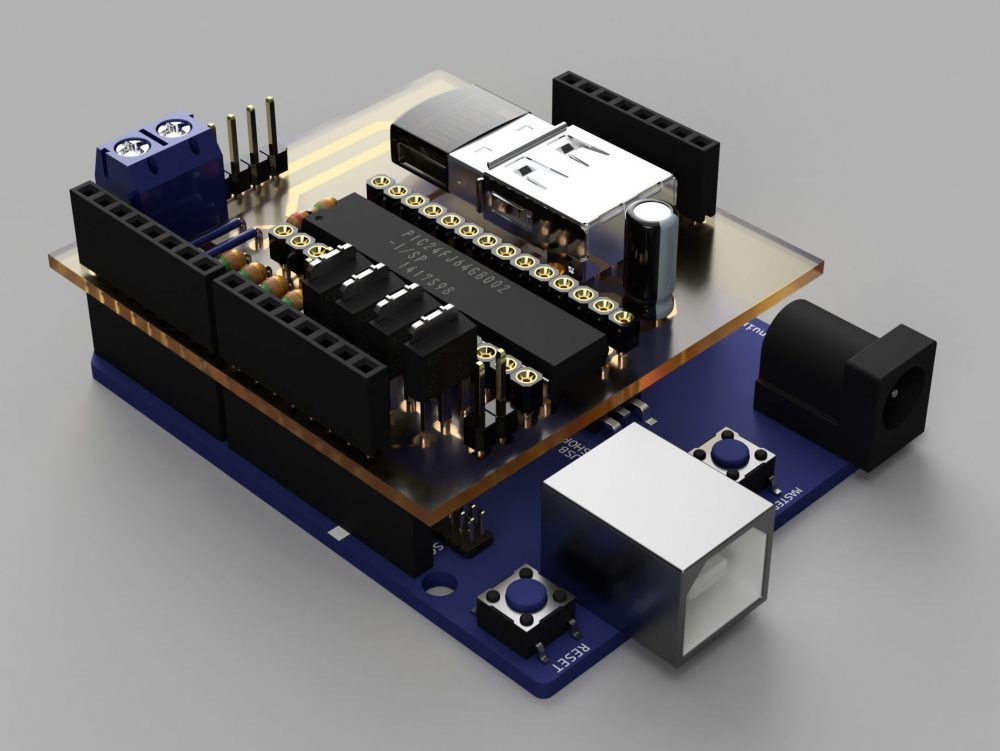
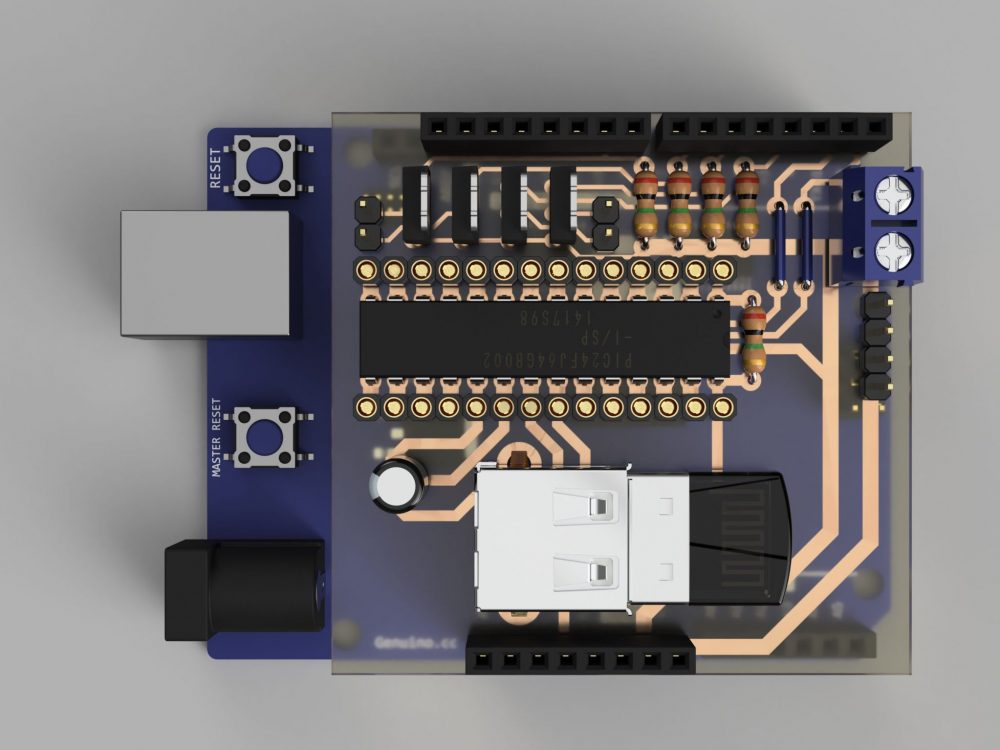
▼部品実装の3Dモデル▼(画像クリックで拡大)
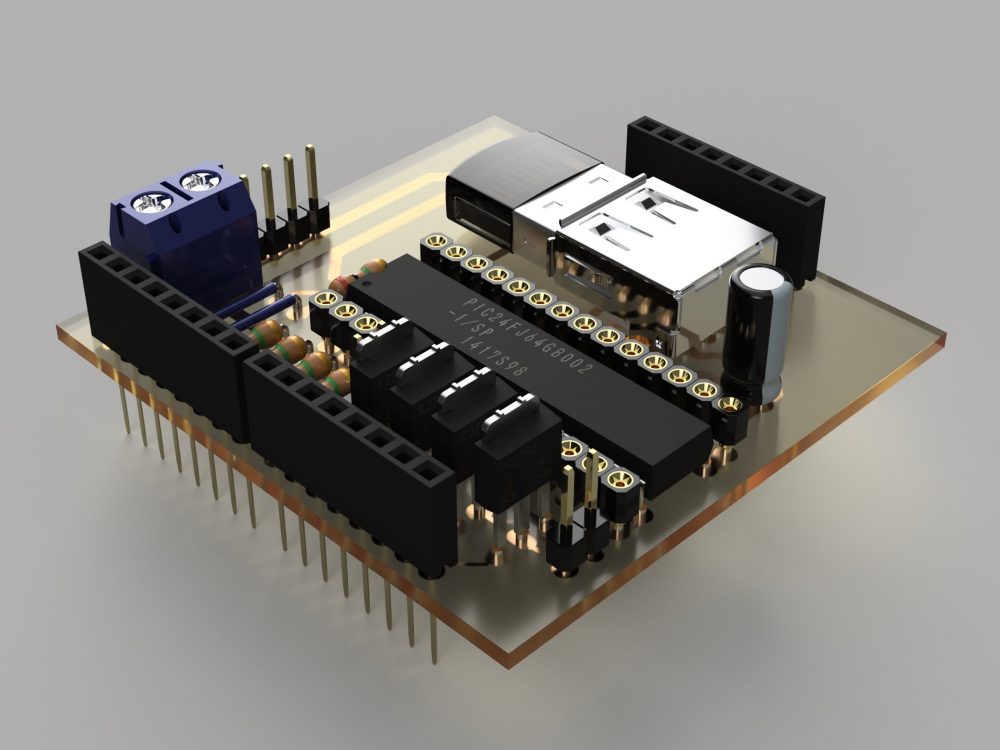
Bluetoothドングル+PICが場所を大部分占有してしまいます。表面実測する技術がないためスルーホール部品を使用。抵抗のカラーコードは適当です。
記事冒頭でArduinoに付けたところのレンダリングをアップしてますがだいぶ重そうです。コアレスモーター仕様前提で回路を考えてますが、この時点でペイロードきつい?。ブラシレスモーター仕様の制御回路も並行して計画するつもりです。
絵に描いただけで一切動作検証していない基板です。試作して動作確認できたら回路図なども紹介したいと思います。時間かかりそうですが・・・。
それにしてもFusion360(3DCAD)はすごいです。ソリッドモデルとレンダリング機能しかまだ使ってませんが、ハイエンドCAD並みの機能といってもいいくらいです。しばらく遊べそうです。
コメント
Arduinoとシールドの組み合わせは良いと思いますが、やはり重くなってしまうのは気になります。
なので、コアレスモータ+表面実装で軽量化かブラシレスモータで確実に推力を得る+Arduinoのどちらかになるかと思います。というのも以前コアレスベースで作ったことがあるのですが、飛ばないという苦い経験をしました。ちなみにその時の機体はバッテリーなしで111gだったかと思います。もしブラシレスモータのシステムを採用したとすればPWMでESCを制御できるので回路もシンプルになりますし、開発もしやすくなります。初めて作る場合は後者の方をオススメします。
参考サイト(パーツ選びをするときに有用)
https://oscarliang.com/250-mini-quad-part-list-fpv/
oscarliangにはこれ以外にも参考になる記事がたくさんあるので探してみてください。
Anon.さん。
コメント有難う御座います。クアッドコプターの自作経験があるのですね。素晴らしいです。オススメ頂いたとおり、私もコアレスベースではきついかと思い始めていて、Arduino+ブラシレス+ESCで検討しようと思ってます。ただブラシレスモーターもESCも使用したことが無いため、さっそく情報集めて勉強を始めてます。参考URLもまたゆっくり見たいと思います。有難う御座います。