

テスト用の筐体が完成したのでとりあえずモータ制御と6軸センサーから角度の検出をテストしてみました。
当初はArduinoで検討していたのですが、そのうちピンが足り無くなりそうだったのと、Bluetooth無線を使ってみたかったので途中からESP32に変更。
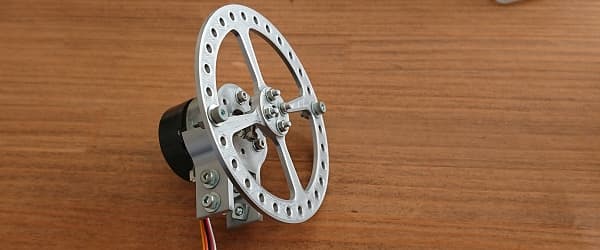
モータは、ブラシ付きDCモータかブラシレスかで悩んでたんですが、ブラシレスDCモーターで検討していくことにしました。
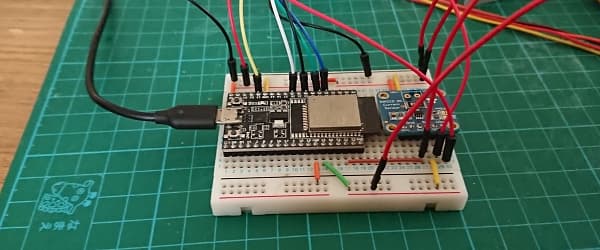
ESP32と6軸センサー(MPU6050)、電流センサー(INA219)を繋げてひとまず稼働確認。
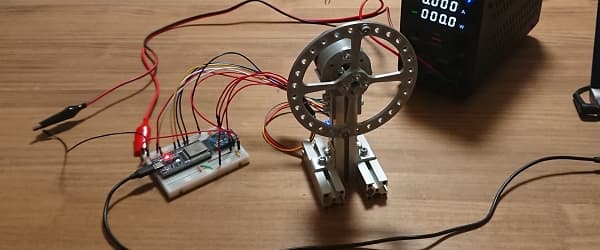
まずはモータ回転テスト
モータに駆動ドライバ、エンコーダーが内蔵されているため、比較的簡単に回転制御と速度計測の稼働が確認できました。この時はRaspberry Pi Pico使ってます。

6軸センサーから角度計測テスト
このテストはESP32を使用。6軸センサーからの情報をBluetooth通信でパソコンへ送信してます。ESP32のBluetooth(SPP)のことを最近知りました。こんなに簡単に無線接続できるならもっと早く使ってみればよかったです。
無線通信とか姿勢可視化とかに興味が魅かれていろいろ試してしまい、本題の倒立振子がなかなか進みません。

コメント