
リアクションホイールで3軸姿勢制御モジュールの自作です。前回、回路基板が完成したので本体に取付けるためのフレームの設計、3Dプリンタで製作、組立てをしていきます。

3Dモデル
回路基板フレーム
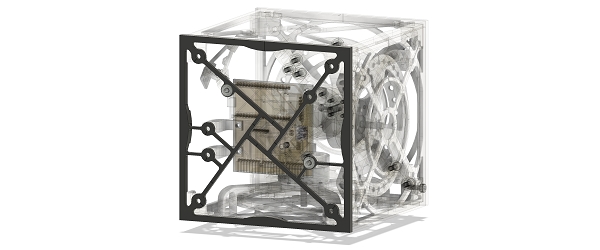
全体の3Dモデル。CUBEのフレームに回路基板を貼り付けるような構造で設計してます。以前作成したモータ側のフレームが思いのほか強い感じだったので、この面は柱の寸法を細くして軽量化を図ってます。基板をぶら下げるだけなのでたいした強度はいらないだろうという考えです。
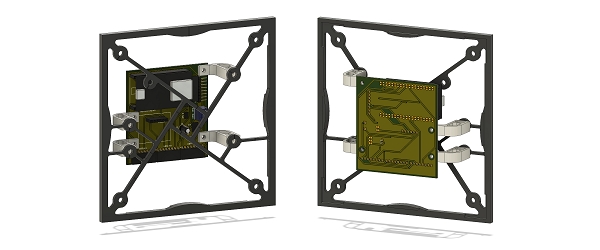
フレームだけ裏表です。3Dモデルは機械系CADで作図しているのですが、回路基板はPCBCADから持ってきたものです。最近のPCBCADは回路基板作成と同時に3Dモデルをほぼ自動で生成してくれるんですね。パターンや電子部品まで再現しくれてリアルで便利。
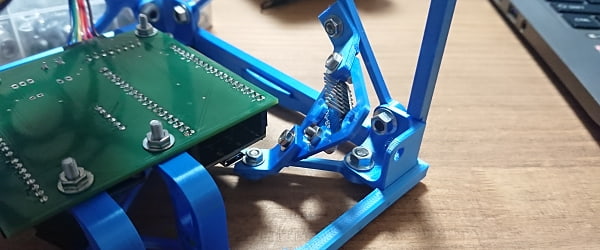
6軸センサー用のブラケット
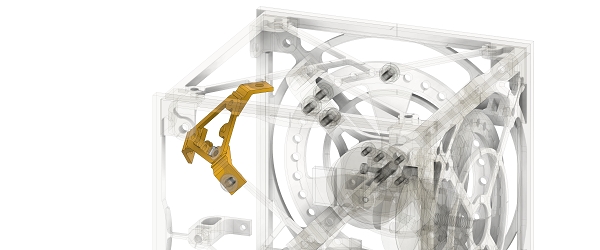
この黄色いのは6軸センサを固定する部品。あまり考えずに角に配置したのですが、後々に傾き角度を計算する際にちょっと苦労しました。
3Dプリンタ出力&組立て
3Dモデルからプリンタで出力していきます。
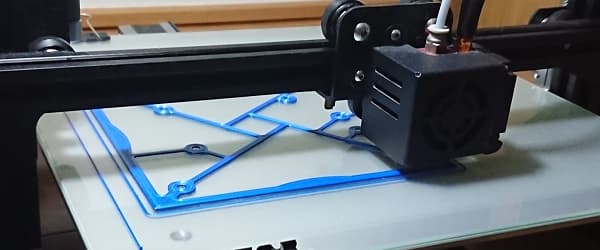
フレーム印刷中。シルクPLA(青)で3時間程度の出力時間です。ほんとはトップ画像にあるように黒色で印刷したいんですがシルク青が余っているので消費してます。
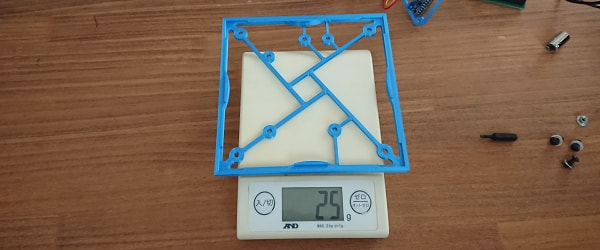
重さ約25g
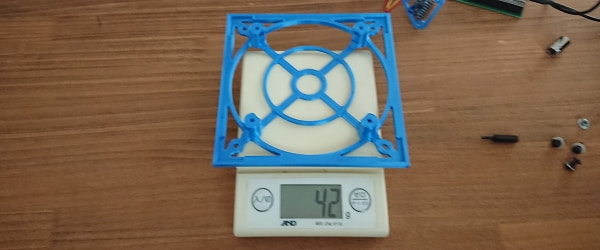
以前作成したモータ側フレームの重量。これに比べて40%程軽量化できてます。
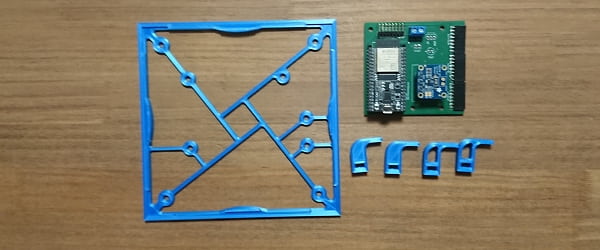
回路基板を取付けるブラケットも出力。フレームと一体で出力しても良かったのですが少し強度のことを気にして別部品にしてます。
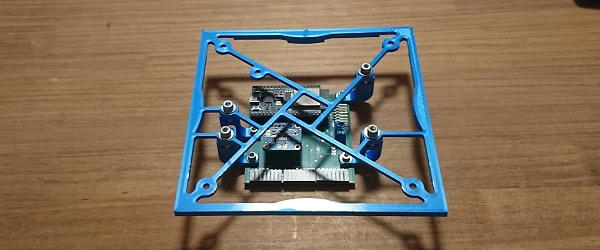
回路基板側フレーム組立て。ボルト&ナットで締めてるだけです。

6軸センサの固定部品も出力・組立て。これもフレームに取付ける足は別部品にしてますが、かなり組立て難かったのでこちらは一体で成型すれば良かったと思ってます。
回路基板フレームと6軸センサを本体に取付けてみました。組立てのことをあまり考えずに設計したので6軸センサがかなり組立て難かったです。
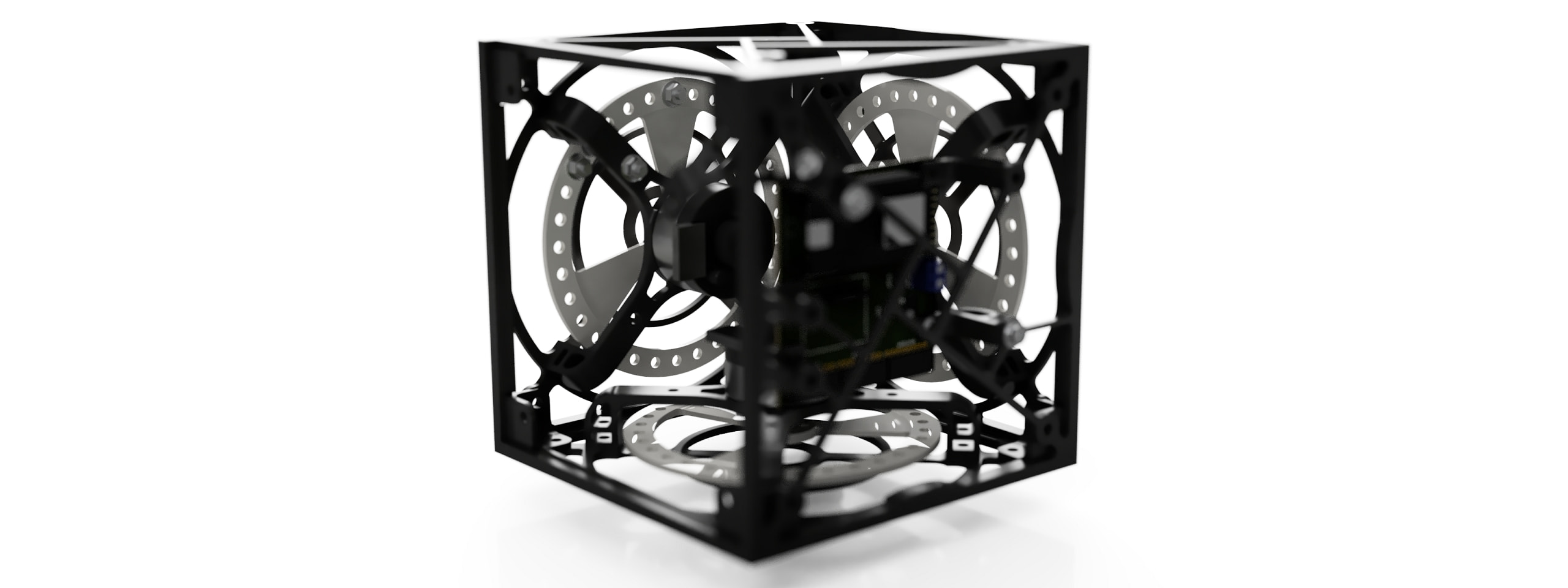
▼筐体がほぼ完成▼
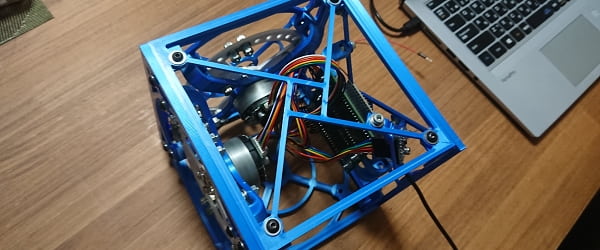
あとモータ一個とバッテリ乗せるところがまだできてませんが、ほぼハードは完成。ようやく倒立制御の検討に入れます。
次回より1軸(1辺)での倒立制御の検討に入っていこうと思います。
コメント