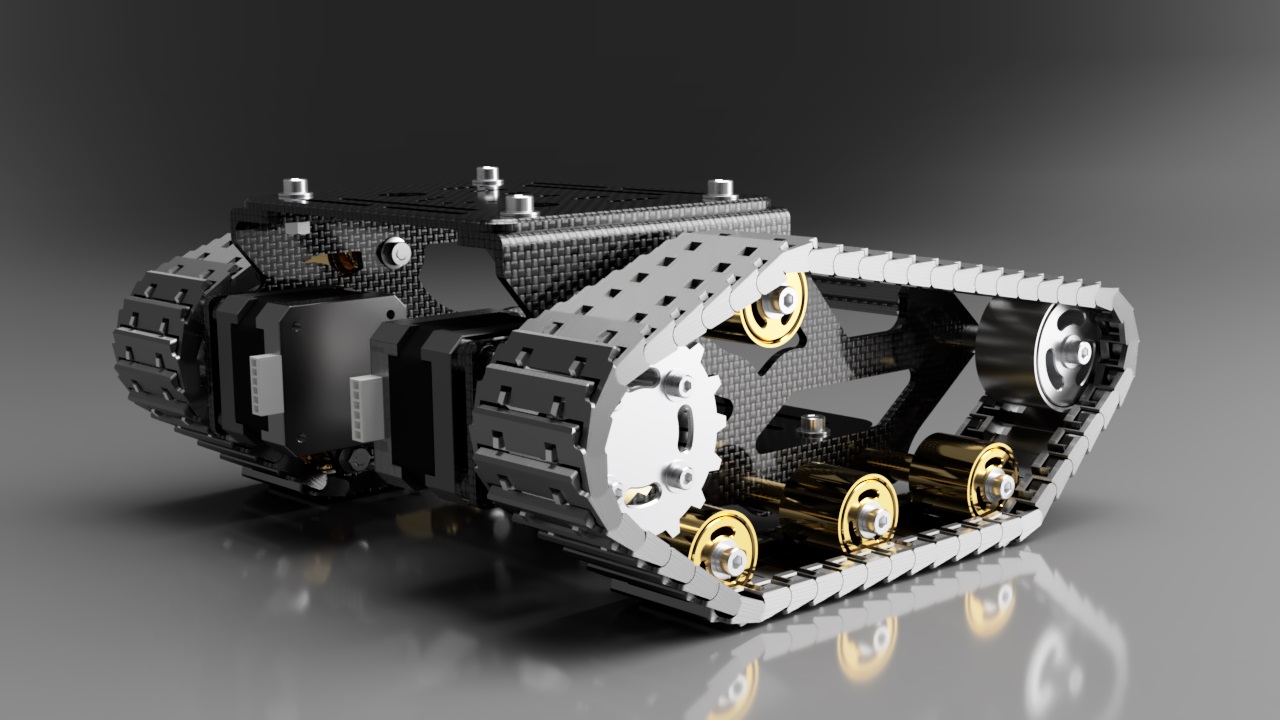

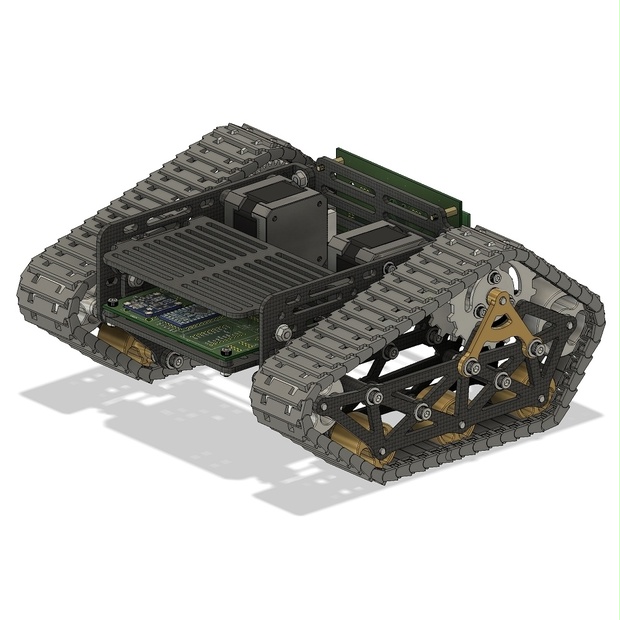
Arduinoでクローラーロボット(戦車ラジコン)の自作です。前回は構想の紹介でしたが、今回はクローラー(キャタピラ)を自作して動きを少しだけ確認してみます。クローラー作れないとこのプロジェクト終了となってしまいますからね・・・。
クローラーも3Dプリンターで準備する予定なのでまずは3Dモデルの作成(設計)です。(これまでの製作記録はこちら)
3Dモデル
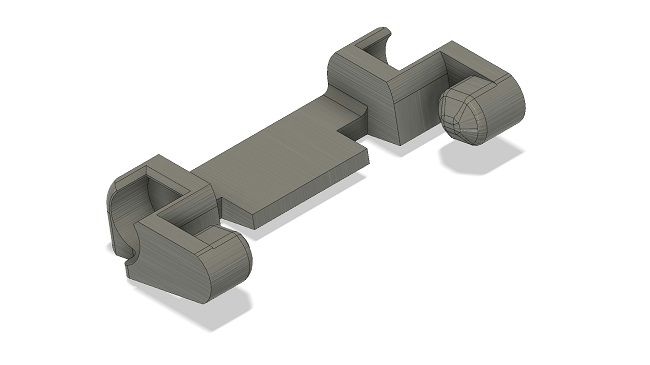
準備した3Dモデルです。現物合わせしあながら寸法微調整して仕上げてます。これひとつだけ見てもよくわからないですね。
▼連結した感じ▼

こういった3Dプリンターで作るものは WEB 上参考にできるところがたくさんあると思っていたのですが思ったよりも少なくて。
ここの考え方を参考にさせてもらってモデリング(設計)しました。
で作成した3Dモデルでテスト印刷です。
3Dプリンタで出力
▼出力品▼

一個ずつ出力してから連結してます。基本的には嵌め込んだら外せない構造。みんな同じように見えるのですが、2個ずつ微妙に寸法変えてます。これで具合の良い寸法見つけてます。
▼動き▼

音はうるさそうですがなかなかスムーズに動きます。これなら十分進められそうです。スプロケットとの噛み合わせの設計が難しそう。早く続きを設計して試してみたいですがこのパーツは全部で104個出力しないといけません・・・。(機械が勝手に出力するだけですが・・・・。)
今回のキャタピラ(クローラー)もそうですけど、歯車やねじなどはずっと見ていても飽きないです。なぜなんですかね。
▼こちらで3Dモデル、回路図(ソース)の頒布を行ってます▼
▼これまでの製作記録はこちら▼

コメント
すごいっす
また見に来ます