前々からチャレンジしている倒立振子だが調整繰り返してトライしていたが、結局うまく倒立できず。キャタピラからタイヤに換装して再チャレンジです。
以前の躯体はこちら▼
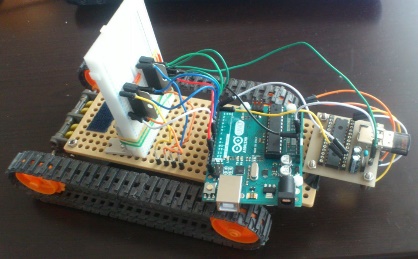
キャタピラでうまいこと倒立振子している動画をどこかで見たことがあったので、同じことができると思いずっとチャレンジしていた。
が、私の技術では惜しいとこまでいくが結局ダメでした。キャタピラでは走行速度が遅すぎてるせいなのか倒立できない。どうしても立たせたくなったのでタミヤ工作シリーズのタイヤを準備しました。
▼こちら


タイヤ部分だけ息子に作らせてみたが途中で挫折。すごく簡単なのに・・、不器用です。
▼完成品

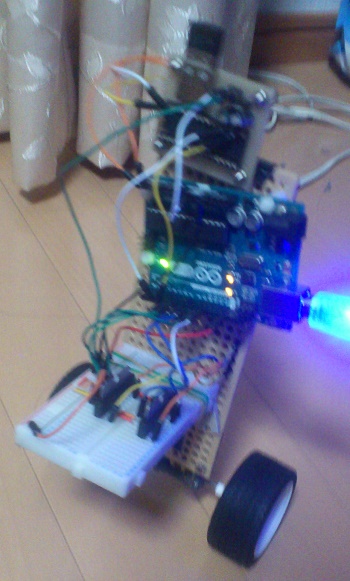
▼さっそくタイヤに換装してみました。
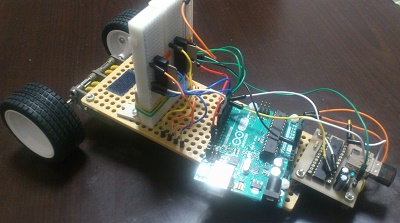
Arduinoはキャタピラ外せばまっすぐ搭載できるかたと思ったのですが、固定穴ピッチの関係で結局傾いたままです。キャタピラ車より少しすっきりしました。
先端についているのはBluettoth送受信機、裏側にWiiモーションプラスから取り出したジャイロが搭載してあります。ジャイロからの情報をI2C通信でArduinoへ渡し、Arduinoで制御⇒モーターへPWM出力してます。
タイヤの径が変わったため制御式のゲインを調整。このゲイン調整と制御式の計算結果をPWMの分解能範囲に収める調整に苦労しましたが何とか倒立することに成功しました。
▼わかり難いですが・・。

長時間の倒立は無理ですが数分~数十分くらいなら倒立します。すごく小刻みな動きなのでもう少しスムーズにしてみたいところです。
参考にさせて頂いたサイトではProccesingでリアルタイムモニタしているのですが、Bluetooth送受信機のせているのでスマホでモニターできるようにしてみたいと思ってます。
コメント