

Arduino/RaspberryPiPicoからドローン用ブラシレスモーターの制御を行ってみます。
概要
球体ロボの自作です。前回駆動確認したところやはりトルクが気になってしまってモーターを換装することにしました。
テスト中の様子。使用しているのはジンバル用のモーター。恐らく自作ESC&回転制御のプログラムが原因なんだと思いますがトルクがちょっと弱く、モーターからの発熱もそれなりに発生します。このまま行こうかとも悩んだんですがもう少しモーターの検討することにしました。

simpleFOCでテスト回転
自作回路(ESC)とプログラムが原因でうまくモーター回転が制御できていない可能性もあるので市販ESCとプログラムライブラリで回転テストしてみます。

左のsimpleFOCminiは勉強しようと昔購入したもの。モーターは今使用しているジンバルモーターです。この組み合わせで回転テストしてみます。
simpleFOCからオープンループ制御で問題無く回転しました。トルクは低め、モーターの発熱もそれなりに発生。ということは自作ESC&プログラムはあまり悪さをしているわけではなくモーターのスペックということになりそう、なのでモーターを変更してみることに。
ドローン用BLDCモーター
入手したモーターがこちら。
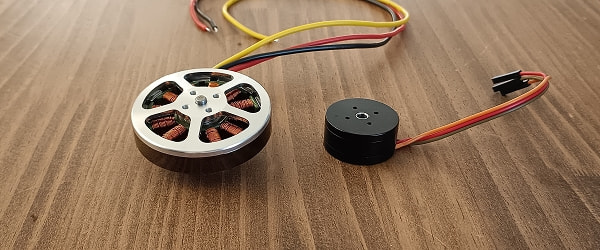
ドローン用のBLDCモーターです。直径50mm程度と大き目。ドローン用モーターは抵抗値が低く取扱い難いとも聞いたことがあったので、できればジンバル用がよかったのですが高価すぎて手が出ませんした。
さっそくテストです。
回路は以前の物をそのまま使用。回転制御プログラムは若干調整してます。普通に回転させるだけなら問題無かったのですが超低速回転がぎこちない感じになってしまいます。

正弦波の分解能と振幅、周期を調整して再トライです。
GIF動画では分り難いですが、低速でもわりと滑らかな回転ができてます。ただ、正弦波の分解能をめちゃくちゃ上げたので演算処理に時間が掛かってしまってこの制御だと最速でも30rpmくらいしかでなさそう。もう少しプログラムは調整する必要がありそうです。
肝心のトルクですが径が大きくなった分、気持ち強くなった感じもします。モーターの発熱はほぼ無くなったのですが、なぜか基板がすごく発熱するようになってしまいました。ステッピングモーターも気になりますし悩みます。
コメント