Arduinoでクローラーロボット(戦車ラジコン)の自作です。ある程度構想が固まってきたので、徐々に機能部分の作成しながら具合確認してます。今回は3Dプリンターでホイールを作成して動きまで確認してみました。(これまでの製作記録はこちら)
ホイールの設計(3Dモデル)
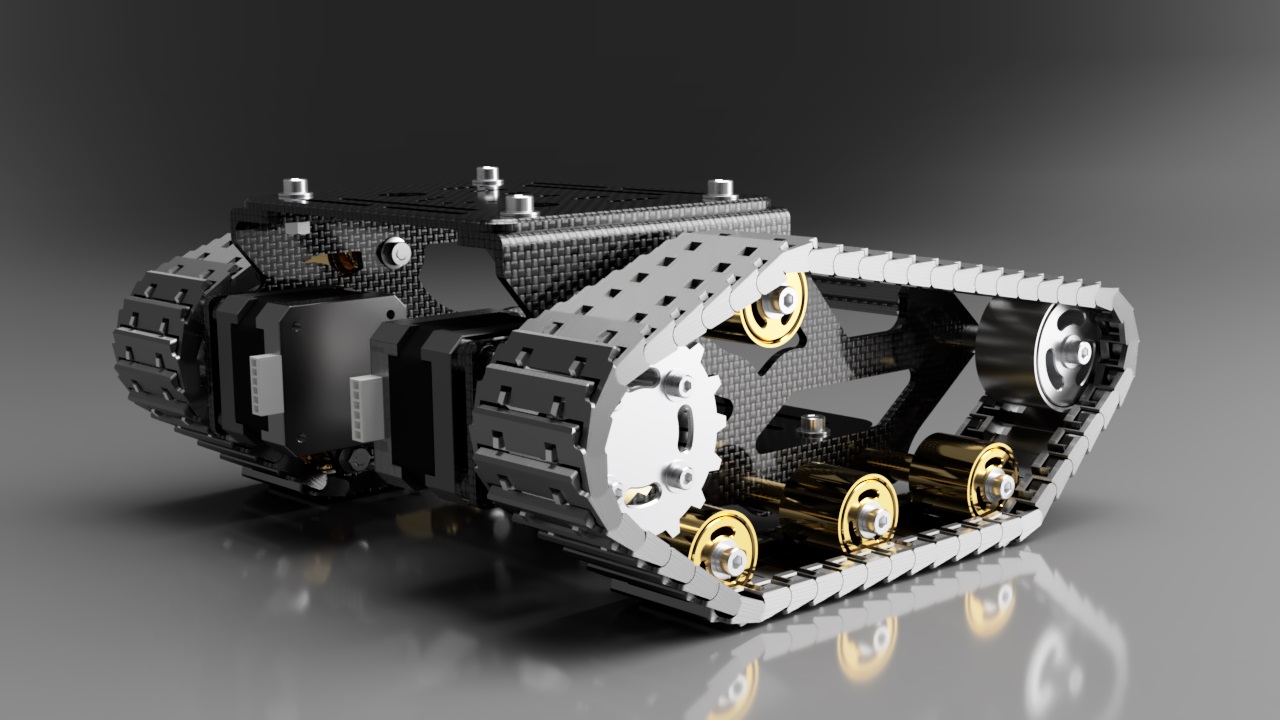
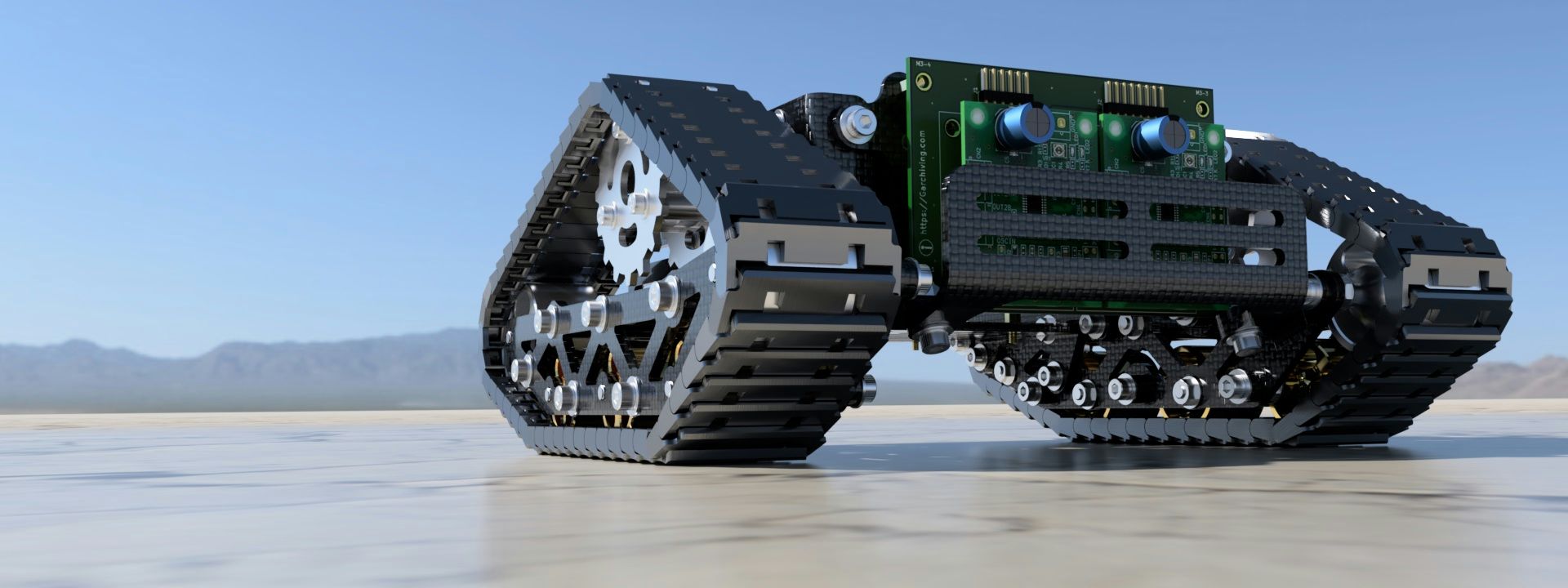
▼全体モデル▼
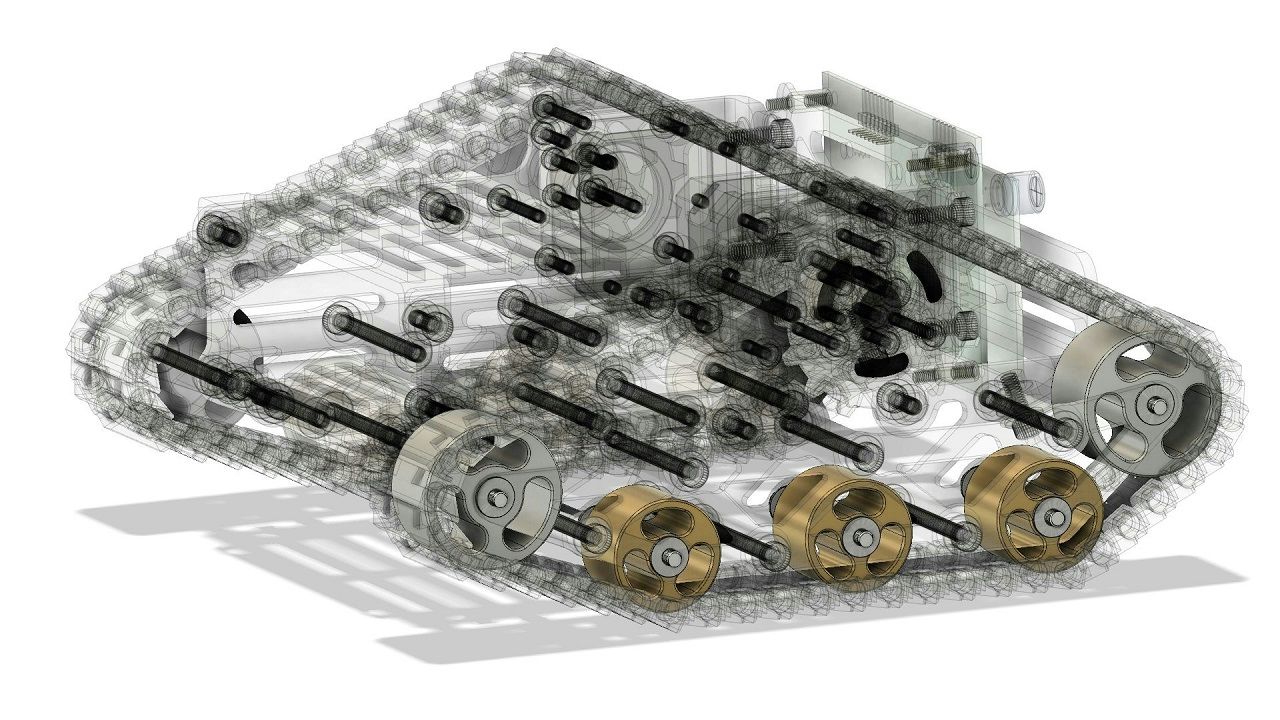
ここでいうホイールとはクローラー(キャタピラ)に沿って配置される輪のことで、遊動輪ともいうみたいですね。空回りする車輪です。(透かすとかえってわかり難いですかね。。)
3Dプリンターで出力することを考えて、ベアリングのように空回りする構造でイメージしてます。
▼ホイールの3Dモデル▼

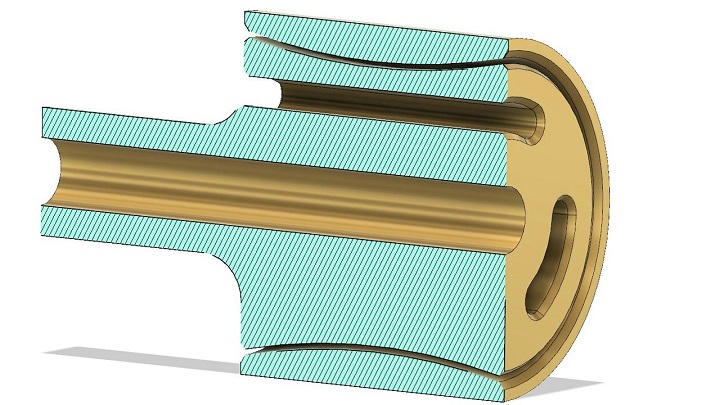
一度の3Dプリントで完成するイメージです。この構造で過去作成したベアリングもどきがあって、その構造をそのまま持ってきてます。
▼3Dプリンターで出力▼
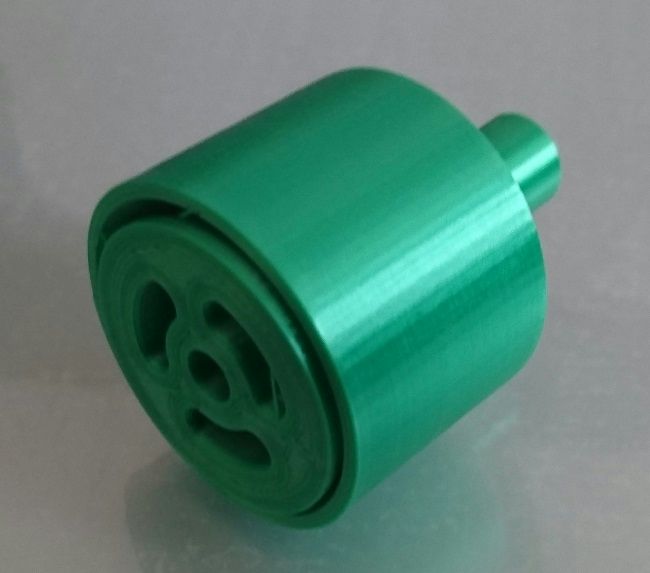
色に意味はありません・・。手持ちのシルク緑で印刷してます。
▼動きを確認▼

一応イメージ通りには完成して摺動は一応します・・・。ですが、GIF動画では伝わり難いですが少し動きが渋い・・。
このままでもいいと思うんですが、、ちょっと微妙です。改良加えたいとよくよく考えていたら、無理に3Dプリンター品で空回り構造を持つ必要ないことに気付いて作り直しました。
▼モデル再作成▼
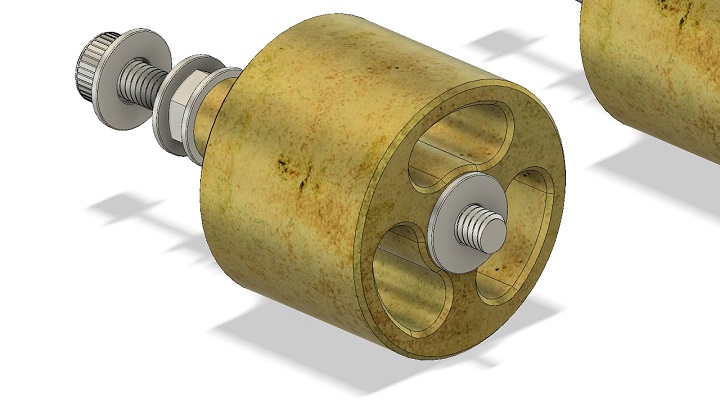

難しいこと考えずに単純にボルトとクリアランス持たせてホイールを空回りさせるだけでよかったです。で実際に作成して動きを確認してみました。
▼出力して動きを確認▼
実際に3Dプリントして確認してみました。最初の構想よりはずいぶん摺動が良くなったと思います。
▼これまでの製作記録はこちら▼

コメント