
Arduinoと3Dプリンターでラジコン戦車(クローラーロボット)の自作です。
ラジコンとしては一応完成はしたのですが、足廻りの設計が適当だったせいかトルクが足りない感じです。
ちょっとした段差も乗り越えることができないくらいトルクが弱いです。(重量が重すぎなのもありますが・・・。)
なので今回はモーターと駆動輪の間にギヤ(歯車)挟んでトルクをアップしてみたいと思います。(これまでの製作記録はこちら)
▼現状▼
現状はこんな感じでモーターに駆動輪(スプロケット)を直付けしてます。径も割と大きいのでトルクは弱いです。でトルクアップのため、スプロケットとモーターの間にギヤ(歯車)挟んで減速させてみたいと思います。
▼ギヤモデル▼
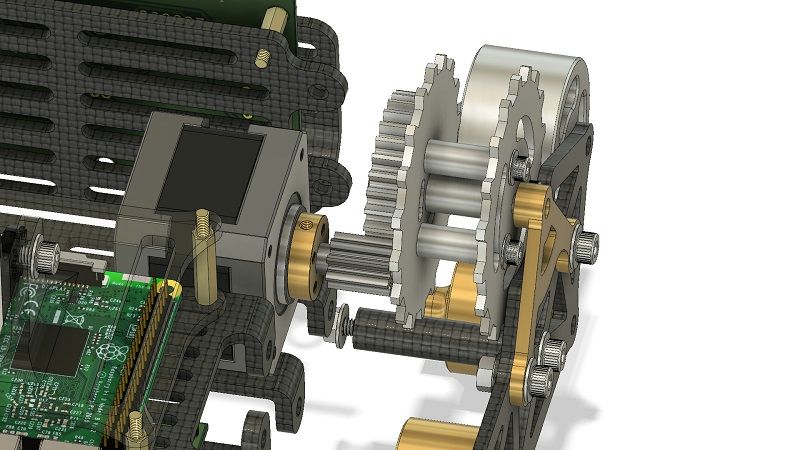
少しわかり難いですが・・、修正(設計変更)したモデルです。ここに来るまで何度かモデリング繰り返してます。ほんとは2段くらいギヤ(歯車)挟んで、もっと減速比を大きくしたかったのですが、スペースと構造的に1段挟むのが限界でした。もっと根本から作り直せば何とかなりそうですが、ここへきてそこまで後戻りするのも嫌なのでこれで行きます。
ギヤのモジュールは「1.25」で設計。3Dプリンターで出力することや、ガタのこと考えるとこれくらいが限界かと思ってこのモジュールサイズにしてます。
減速比は 4 : 1 程度・・・。ほんとはもっと減速したいところです。
▼3Dプリンターで出力▼
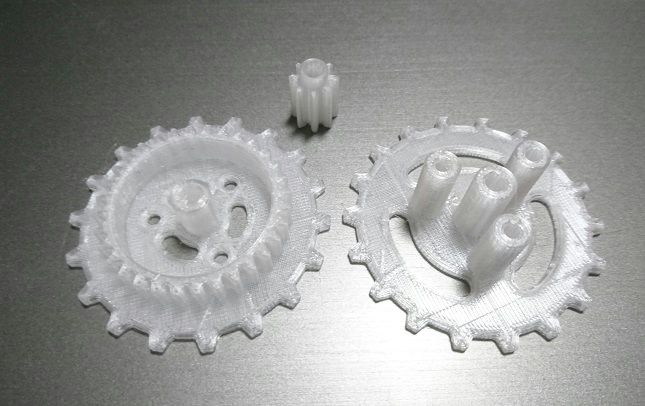
ギヤ(歯車)が思ったよりきれいに出力できてます。
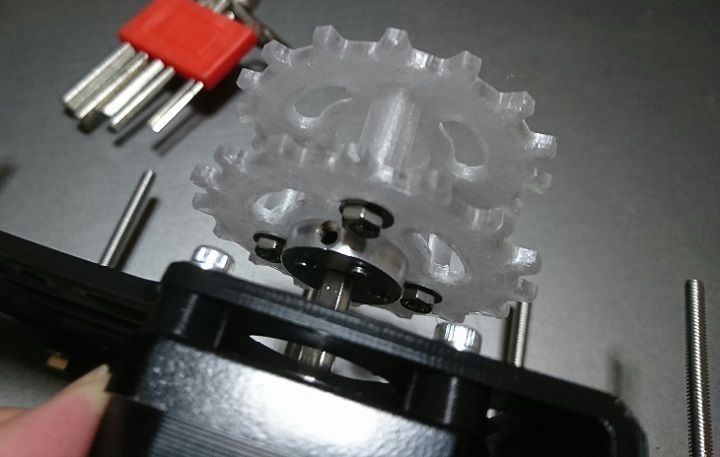
▼小歯車の取り付け▼

Dカットされているシャフトにそのまま嵌めれるように穴形状合わせてます。嵌め合いは(穴径に対して全周)片側0.05mmのクリアランスで設計してますが、きつすぎることも、ガタもなくピッタリいい具合の嵌め合い。
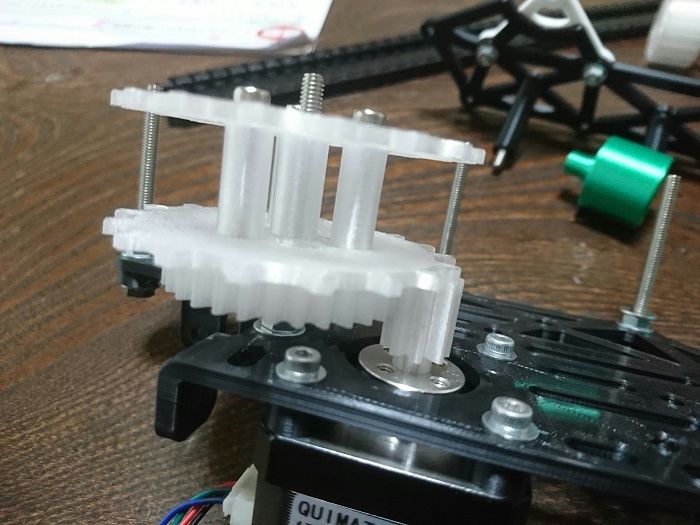
スプロケットを組立てて筐体に合わせてみたところです。噛み合い悪くないです。強度心配だったので歯車の厚みを7mmも持たせたのですが半分くらいでも良かったかも。
モジュールももっと小さく、「1」とか「0.8」でも行けそうな感じです。ここまできれいに3Dプリンター出力できるなら、小型化してもう1段歯車追加して、減速比もっと大きくできるかも・・・。
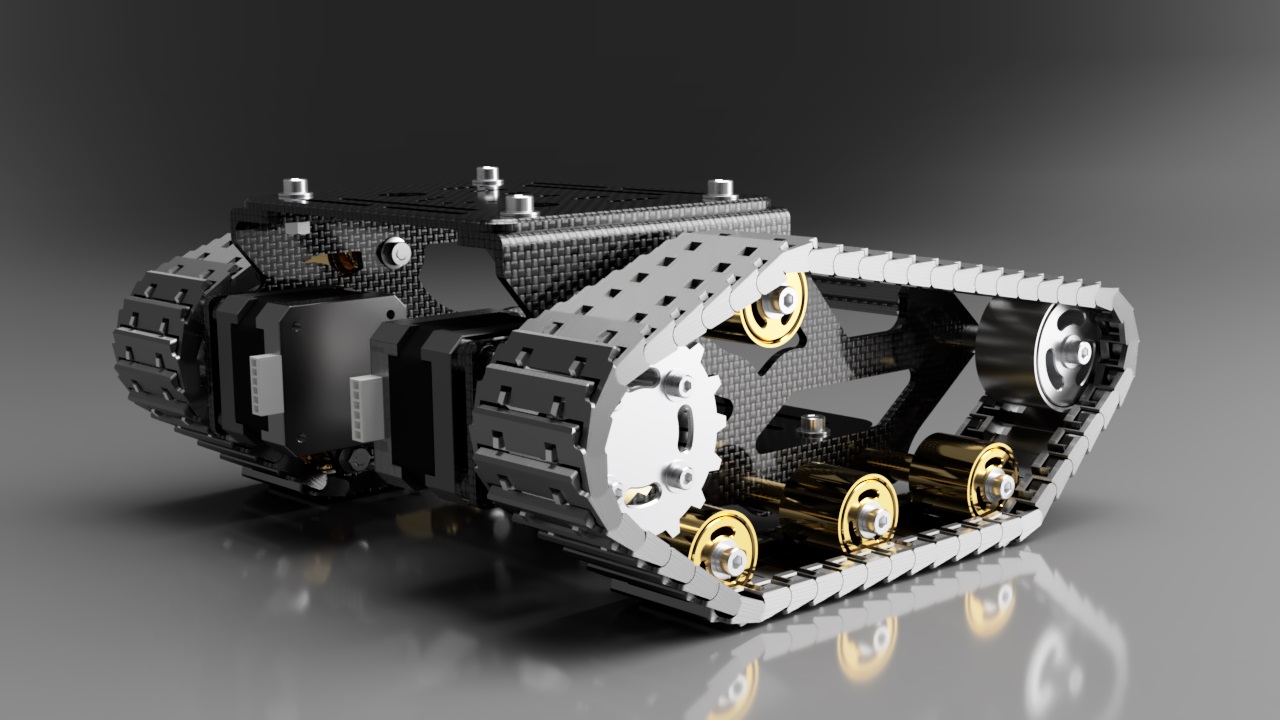
▼換装完了▼

クローラー付けて改造完了です。カバーが少し寸足らずになってしまったので、白いパーツで繋いでます。クローラー(キャタピラ)も長さ足りなくなったので2個ほど追加して継ぎ足してます。(色が白いのは意味ないです)
で目的のトルクですが、少しはアップした感じ。トルク測定は難しいので定性的ですが、ちょっとした段差なら乗り越えられそうなくらいはパワーアップしてる感じです。
▼これまでの製作記録▼

コメント