
Arduinoと3Dプリンターでクローラーロボット(ラジコン戦車)の自作です。
ハードも概ね完成して動作確認もまずまずだったので、大きな部分のソフトウェア廻りをいっきに実装してしまいます。
最初から手持ちのセンサー類を全部搭載するつもりだったので、概ねのセンサーはすでに基板に乗っけてあります。
▼回路基板▼
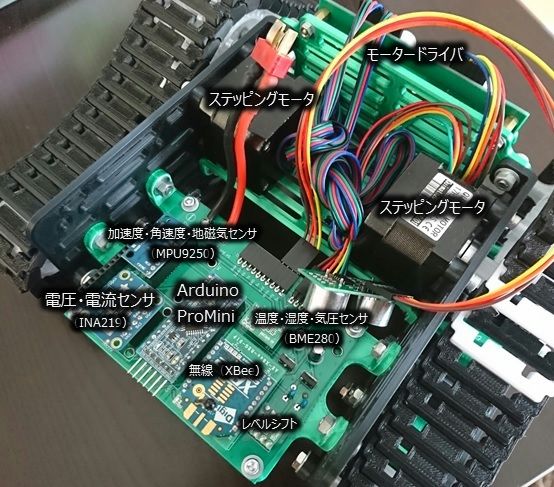
制御はArduinoProMiniを使用します。Arduinoのピンをここまで同時に使うのは初めてです。センサー類たくさん載せてますがただ情報をモニターしてるだけで今のところ制御にフィードバックしてるとかそういうことはしてません。
あとこの他にGPS、超音波センサーを追加する予定。Arduinoピン足りないかも・・・。
▼各種センサーとかの使い方▼



▼これまでの製作記録まとめ▼

コメント