Arduinoでクローラーロボット(戦車ラジコン)の自作です。
前回、クローラー(キャタピラ)の設計はある程度目途付けが完了しました。今回は構想設計で問題がありそうなところがあるので先にその部分の修正をしてしまいます。(これまでの製作記録はこちら)
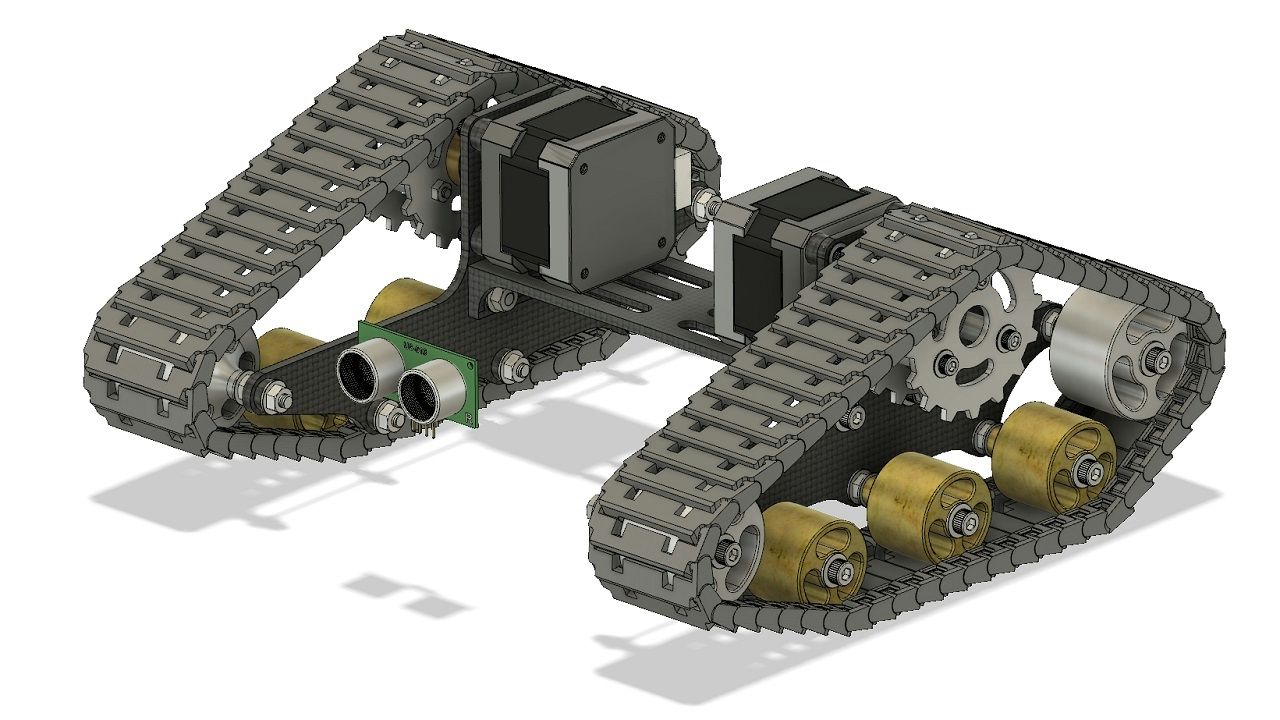
▼構想時の3Dモデル▼

構想段階ではこんな感じで設計していたのですが、後々問題となりそうなところに気付きまして。。。さっそく設計変更です。
ステッピングモーターを車体の後方、というか後ろギリギリに配置。見た目の雰囲気だけで設計してます。
このままだとちょっとした段差を乗り越えるだけでひっくり返りそう。というか何もしてなくても倒立してしまいそうです・・・・。在り物のモータ使いまわす予定なので一個重さは400g程度、左右の2個でかなりの重さになりバランス悪すぎです。
モーターを軽いものに変えるか、前方に重り乗っけてバランスとるかなどなど、このまま対策できないかとも考えたのですが、まだ大して何も作り始めていないので構想からやり直すことにしました。
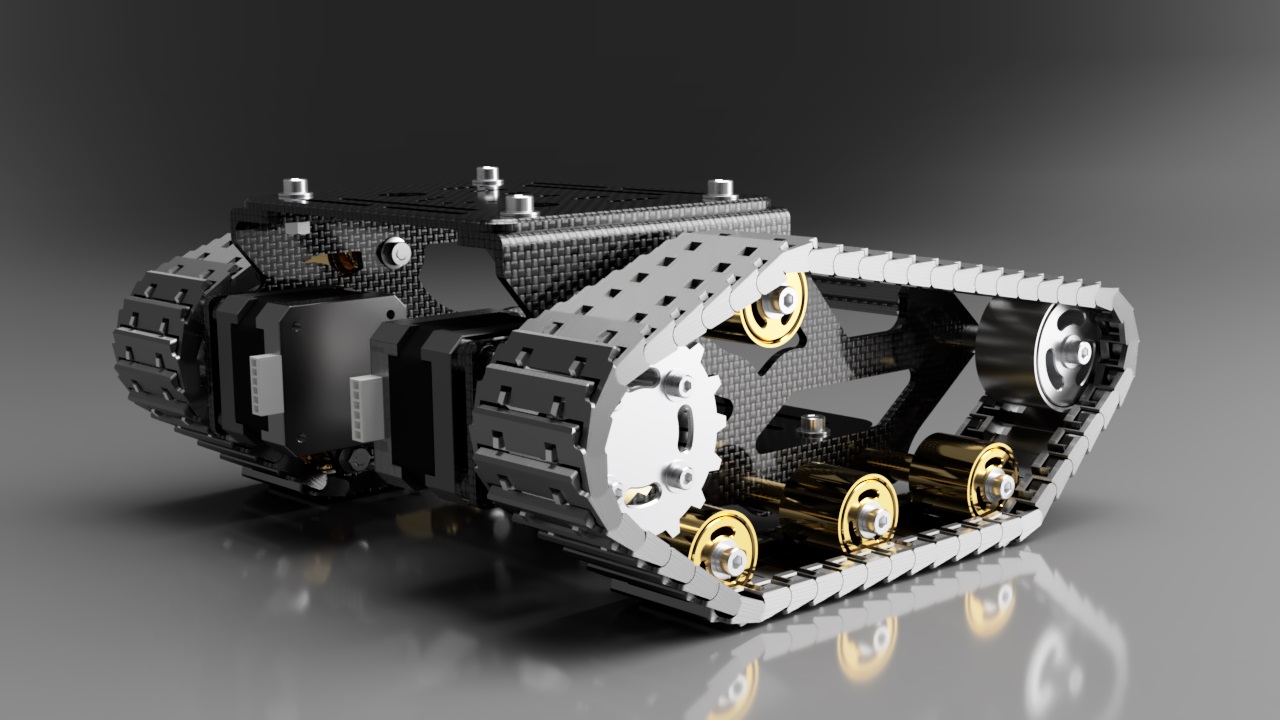
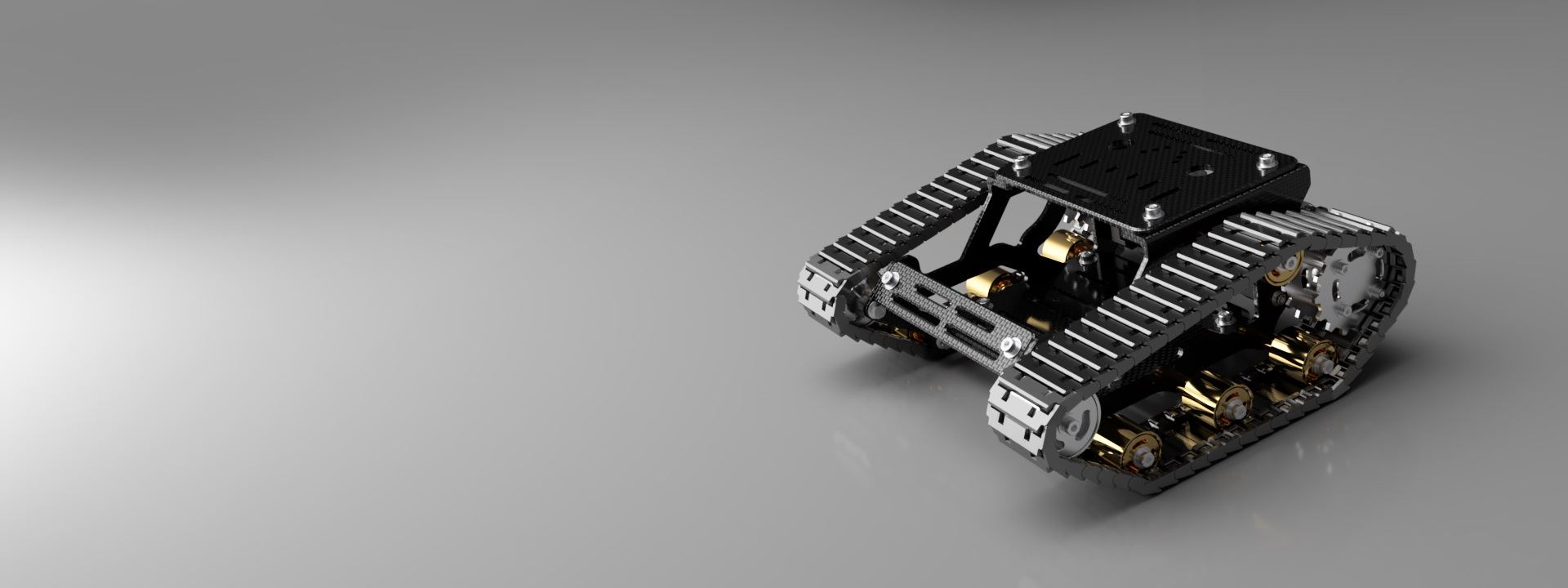
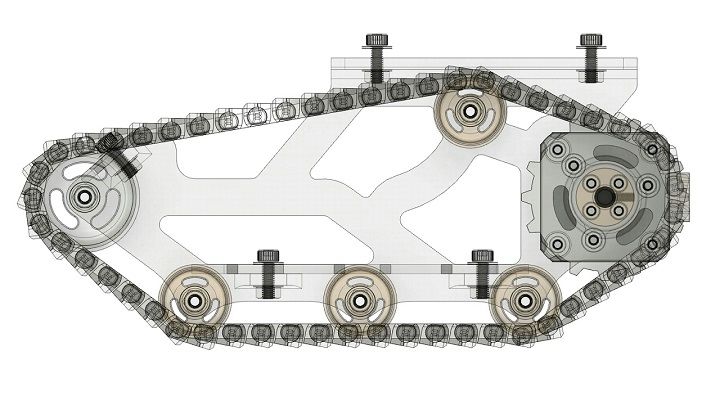
▼修正後のモデル▼
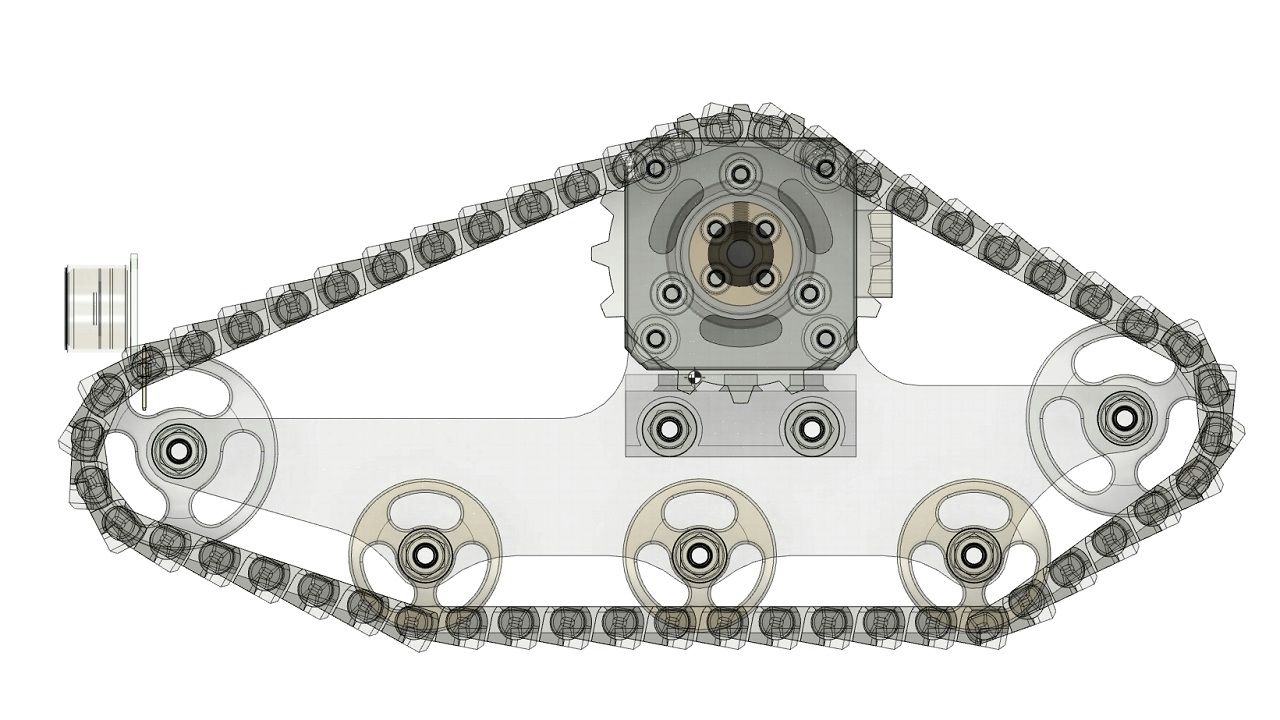
モーターを起動輪(スプロケット)ごと中央へ移動。重心が中央に移動したので以前に比べればだいぶ安定するはず?です。
スプロケとクローラーの噛合せが薄くなるところが少し心配ですが、、。とりあえずこの構想で先へ進んで行きたいと思います。
▼これまでの製作記録はこちら▼

コメント