

3軸姿勢制御モジュールの自作です。気になる所が多かったので、筐体設計をほぼ見直して作り直しました。
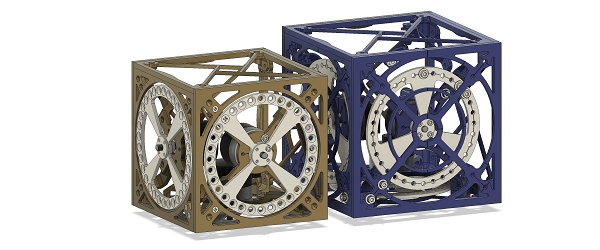
右が1号機、左が2号機で小型化したのですが、気になる所が多かったのでさらに設計を見直しました。
前回作成した2号機ですが小型化した割に思いのほか軽量効果が無かったのと、強度的にまだまだ十分な感じだったので思い切ってさらに軽量化したパターンを作ってみました。
ちょっと興味があって前々からやってみたいと思っていた3Dモデリング過程をタイムラプスで撮影してます。

連休中に一気に作り上げました。

これは改造前です。フレームをひと廻り以上細くしたので随分すっきりしたと思います。

2号機改の重量(ホイール、バッテリ無し)です。一応前回に比べて⊿5%(32g)程軽量化できます。思ったより少ない、、。全体ウェイトのモーターの占める重量がネックですかね。
とりあえずハードは納得できたので、ソフト検討の方に入っていきます。
コメント