

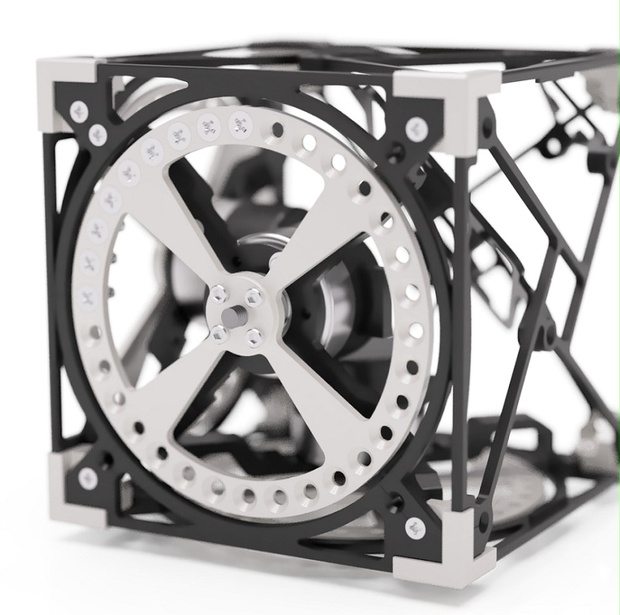
3軸姿勢制御モジュールの自作です。今回はスタンドアローン化(有線⇒無線化)しました。
概要
前回、点倒立制御が一段落ついて次に小型化するか悩んだんですが簡単にできそうなスタンドアローン化から取り組みました。安定化電源 ⇒ リポバッテリーに変更。有線シリアル通信 ⇒ Bluetooth無線に変更してスタンドアローン化してます。

ハード改造
バッテリーを搭載するために筐体を少し改造しました。
コネクタの取付け

使用するバッテリーはリポ3s。昔、ドローンを作成していた時に使用していたもの。大きいくて古いのが心配でしたが使えそうだったので費用を抑えるため流用。バッテリーはT型コネクタなので基板側にメスコネクタを付けます。

基板側にリード線経由でオスコネクタをハンダ付けします。ハンダ作業は苦手。
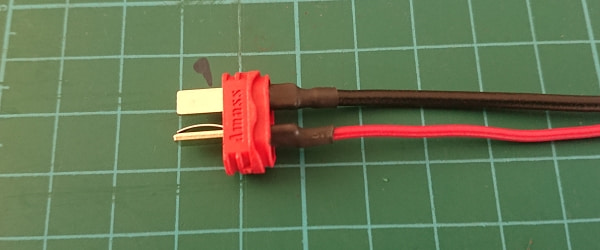
カバー付きのコネクタを入手したのですがカバー内でのショートが心配、と口コミにあったので習って収縮チューブを被せました。在り物の電線使用したので若干赤色線が細め。反対側を基板に取り付けて基板の改造は完了です。
バッテリーの搭載
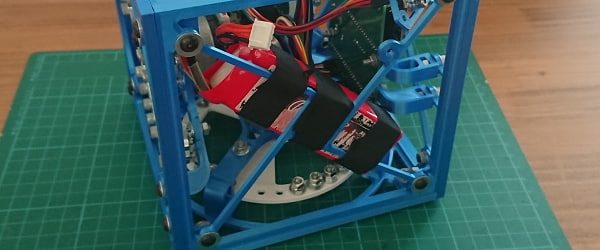
ほんとはフレームを改造してきちんと取付けようかとも思ったのですが、とりあえずテープで固定して完了。そのうち筐体は設計ごとやり直す予定なのでここでは手を抜きました。
プログラムの調整
バッテリーが重いのと取り付け箇所の影響で重心バランスがかなり変わってしまったため、制御プログラムも少し調整しました。
バランスポイントがかなり変わってしまいました。センサーキャリブレーションを手動でやり直してるところ。有線シリアルでやり取りしていた情報をBluetooth無線に変更してます。
キャリブレーション終わって、制御プログラムは有線の時のそのままで試してみたのですがやはり倒立できず。
PIDを調整してスタンドアローン化完了です。
安定倒立、小型化、起き上がり動作の検討と、やりたいことが未だありますが、とりあえず一段落ついた感じ。今回の内容で3Dモデル/回路図/プログラムを頒布開始しました。
▼BOOTHサイト▼
コメント