Arduinoと3Dプリンターでクローラーロボット(ラジコン戦車)の自作です。
前回作成したチルト機構付きのカメラを搭載します。
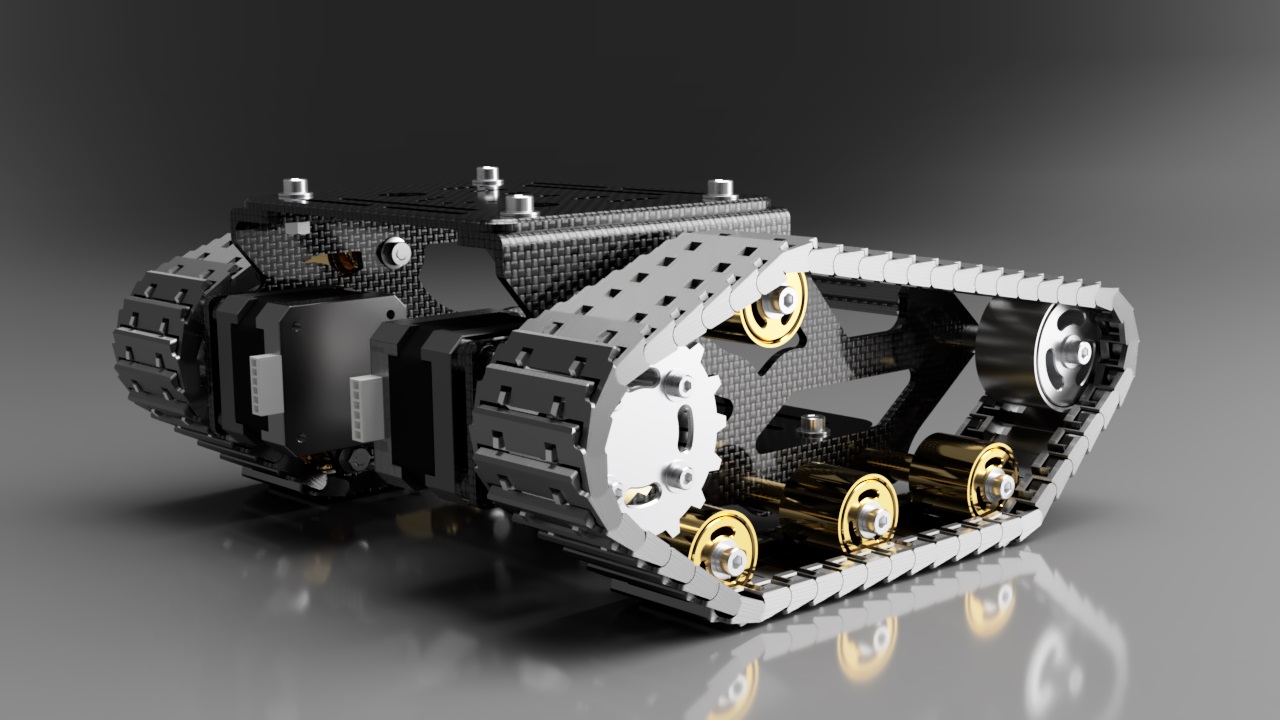
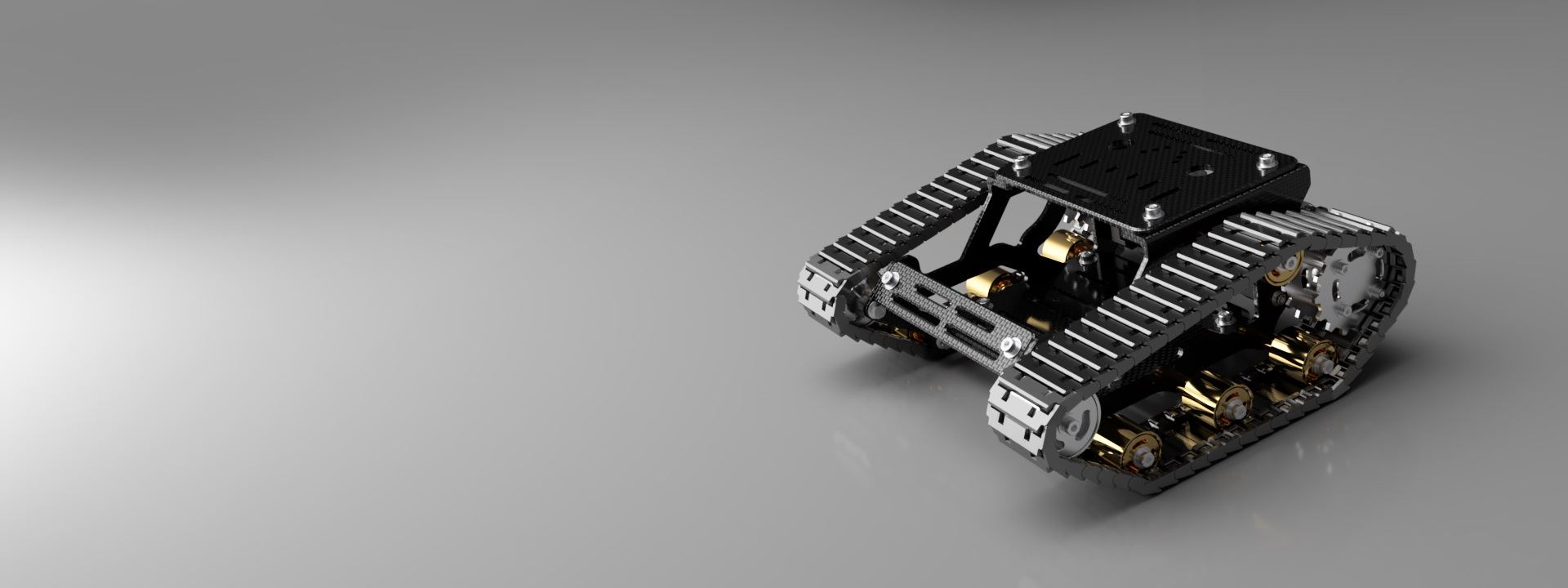
▼3Dモデル▼
カメラ搭載するために少しだけ筐体の3Dモデルをいじってます。そのためフレームの一部は作り直しです。ラズパイは最初ふつうの物を使おうと思っていたのですがかなり大きかったのでzeroにしました。それでもだいぶ不恰好。
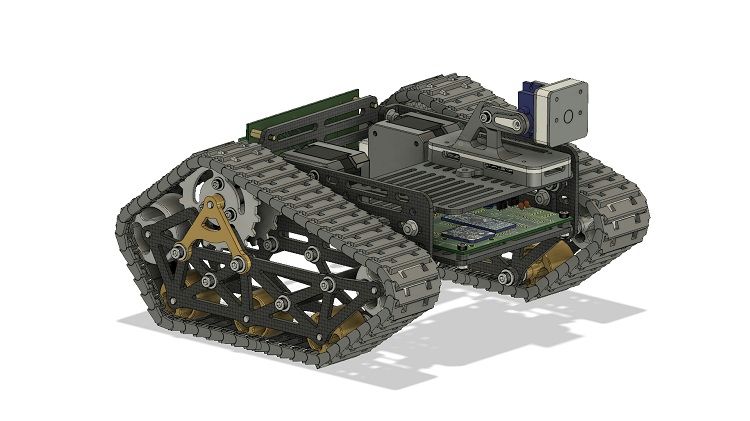
▼搭載▼
少し3Dモデルと違いますがカメラを搭載。サーボ制御(カメラチルト)はArduinoから行います。ラズパイでは映像配信のみ。
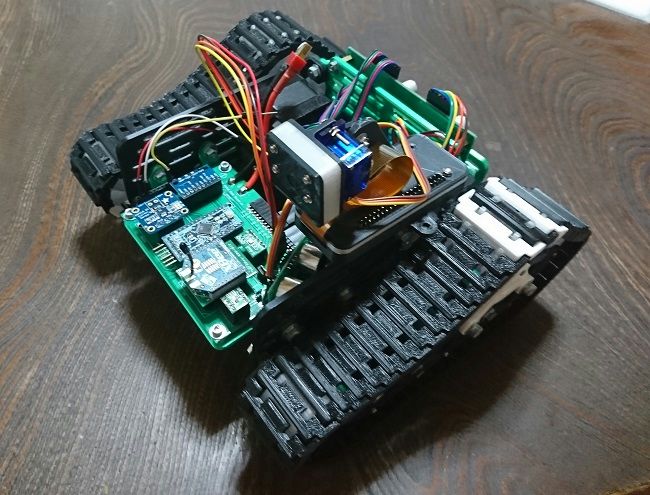
カメラ(RaspberryPi)搭載は初期から構想していて電源のことも気を付けていたのですが、、途中から忘れてて電源廻りのこと忘れてました・・。
ダメ元でバッテリーから今付いてるレギュレーター経由で5vをラズパイに供給してみたのですが、かろうじて電源は入るけど動作がかなり不安定で動画配信は無理そう。
レギュレーターが非力で電流が足りていないようです。しかたなく RaspberryPi にはモバイルバッテリー使って別で電源準備します。
だいぶ不格好になってきました。最終的に落ち着いたら上から意匠カバーみたいなのを被せてぼろ隠ししても良いかもしれないですね。
カメラの動作確認をしたいのでソフトを改造しなければいけません・・。

コメント