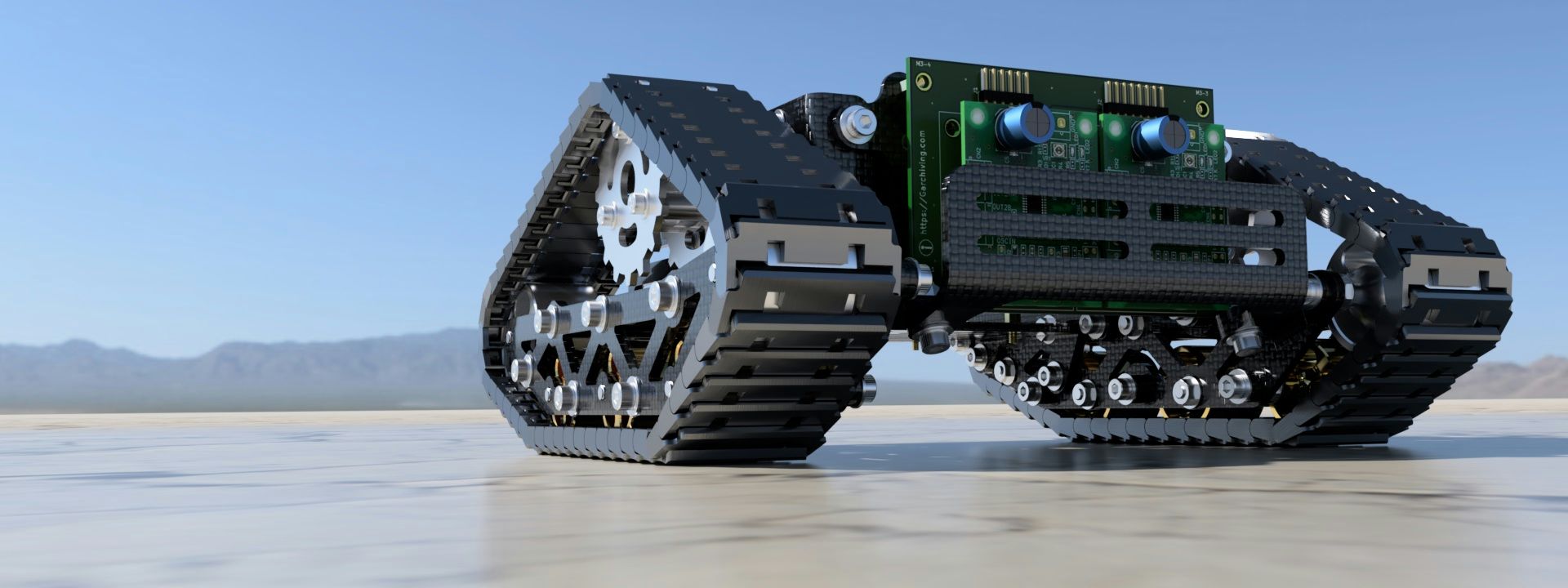
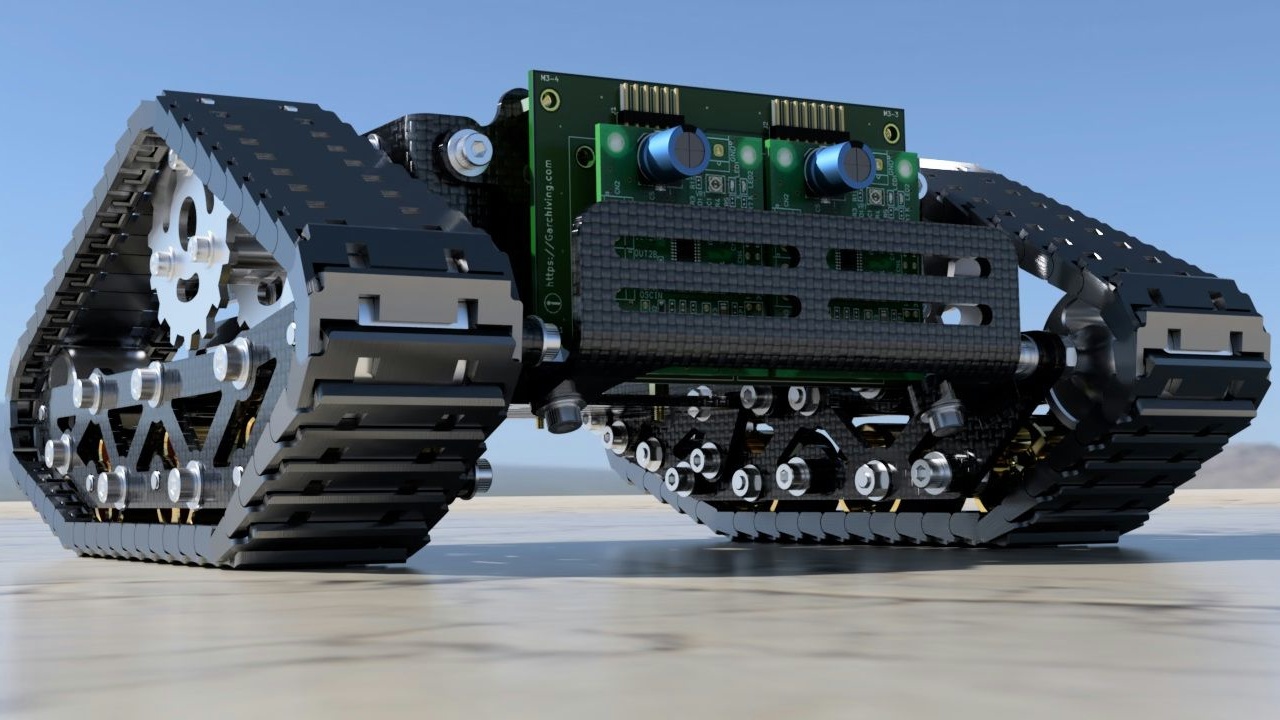
Arduinoでクローラーロボット(戦車ラジコン)の自作です。前回、足廻りがいったん完成したので、ステッピングモーターに通電して、クローラー(キャタピラ)の動作確認をしてみました。(これまでの製作記録はこちら)
▼動作確認▼
倒立振子のときに作った在り物の制御基板とProcessingで作った操作アプリを少し修正して使いまわしてます。とりあえずの動作確認です。
心配だったクローラー(キャタピラ)の動きが思ったよりもスムーズに回転してよかったです。
▼これまでの製作記録▼
 電子工作(マイコン全般)
電子工作(マイコン全般)Arduinoでクローラーロボット(戦車ラジコン)の自作です。前回、足廻りがいったん完成したので、ステッピングモーターに通電して、クローラー(キャタピラ)の動作確認をしてみました。(これまでの製作記録はこちら)
▼動作確認▼
倒立振子のときに作った在り物の制御基板とProcessingで作った操作アプリを少し修正して使いまわしてます。とりあえずの動作確認です。
心配だったクローラー(キャタピラ)の動きが思ったよりもスムーズに回転してよかったです。
▼これまでの製作記録▼

コメント