
超音波センサーを使って障害物レーダーのようなものを作ってみました。超音波センサーから取得・算出した距離情報をArduinoで処理して、Processingで障害物をレーダー探知機のように可視化してます。

▼超音波レーダー▼
ほんとはサーボモーターで超音波センサーを動かしたかったのですが・・。サーボのノイズ??がかなり超音波センサーに影響してしまって。いろいろやってみたのですが、ノイズ除去ができなかったです。
なので仕方なく手で動かしてます・・。そのため、センサーの向き(角度)を捕捉するために6軸センサー使ってます。
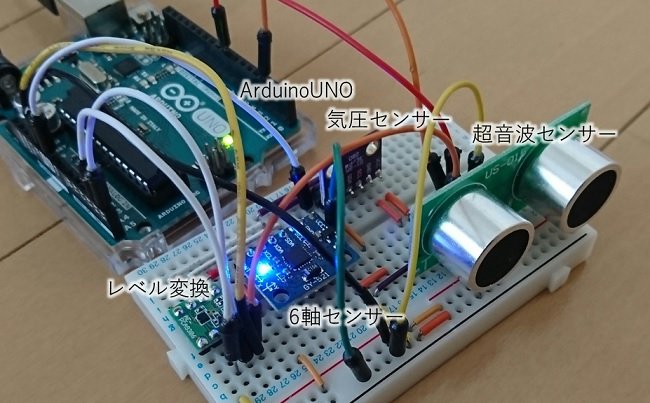
気圧センサーのっけてますけど使ってません・・。
Arduinoでは
- 6軸センサーで角度を算出
- 超音波センサーで測定物との距離を算出
- 算出したセンサー情報をPCへシリアル送信
Processingでは、Arduinoから送られてきたセンサー情報をもとにリアルタイムでレーダーっぽく可視化してます。
今回は使い方を覚えるのを兼ねてこのようなものを作りましたが、ドローン(クアッドコプター)の位置(高さ)制御に使えないかと考えてます。
もともと気圧センサーで検討していたのですが、それほど高くまで飛ばさないですし、超音波センサーでも4mくらいまでは測れるみたいですし・・・、悩みます。
コメント