 3D プリンタ
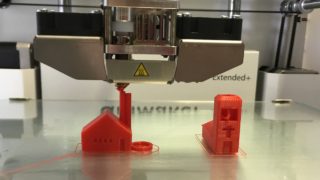
3D プリンタ 3Dプリンター テクスチャー入りのプラットフォーム(PEI/PET)を使ってみる
テクスチャ入りのPEI/PETプラットフォーム(ビルドプレート)を使ってみました。概要 今使用している3Dプリンターのプラットフォームは純正のガラスベッドに3M製の保護フィルムみたいな物貼った状態でずっと使用してきました。傷だらけで最近は造...
3D プリンタ  3軸姿勢制御モジュール 3軸姿勢制御モジュール
3軸姿勢制御モジュール 3軸姿勢制御モジュール  3D CAD 3D CAD
3D CAD 3D CAD  小ネタ
小ネタ  3軸姿勢制御モジュール
3軸姿勢制御モジュール  3軸姿勢制御モジュール
3軸姿勢制御モジュール  電子工作(マイコン全般)
電子工作(マイコン全般) 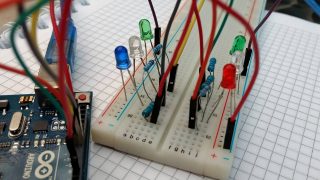 電子工作(マイコン全般)
電子工作(マイコン全般)