ボール型ロボットの自作です。今回はメイン駆動となるタイヤを3Dプリンターで作成してみました。タイヤは弾力を持たせたかったため、ゴム弾性のような性質を持つというTPUフィラメントを使ってみました。(ボール型ロボットの製作記録はこちらにまとめてます)
まずは3Dモデル
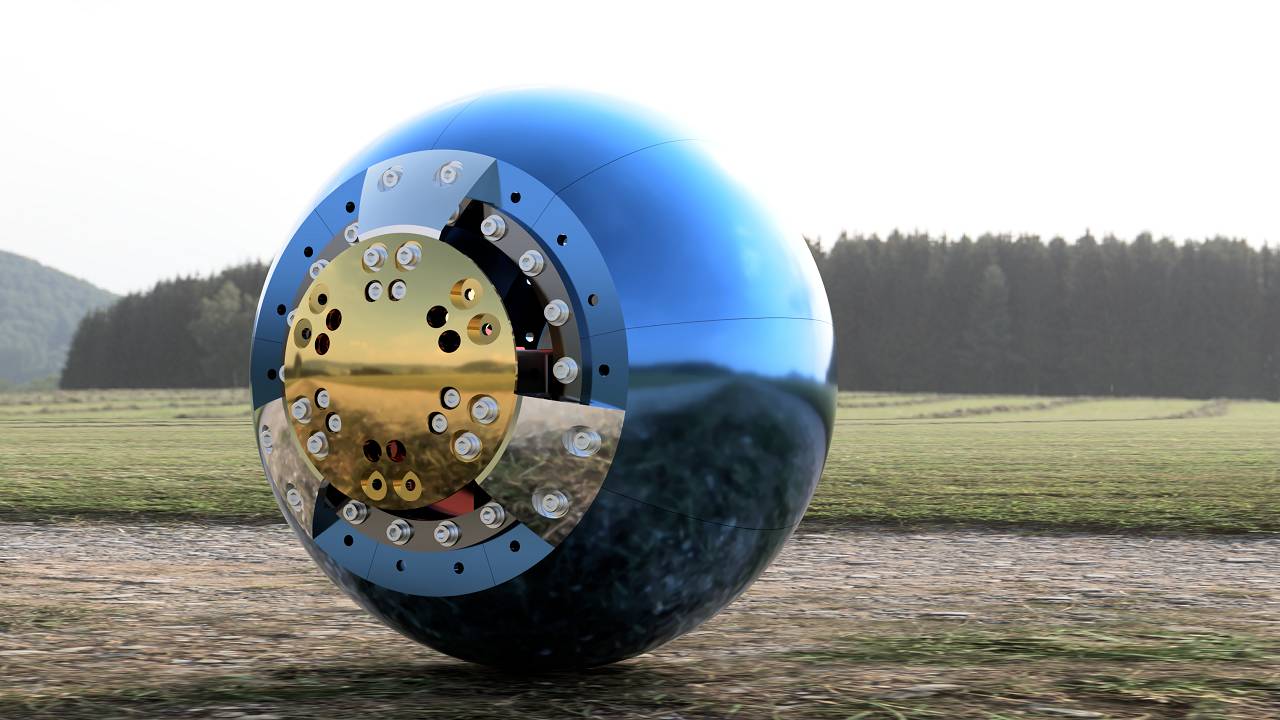
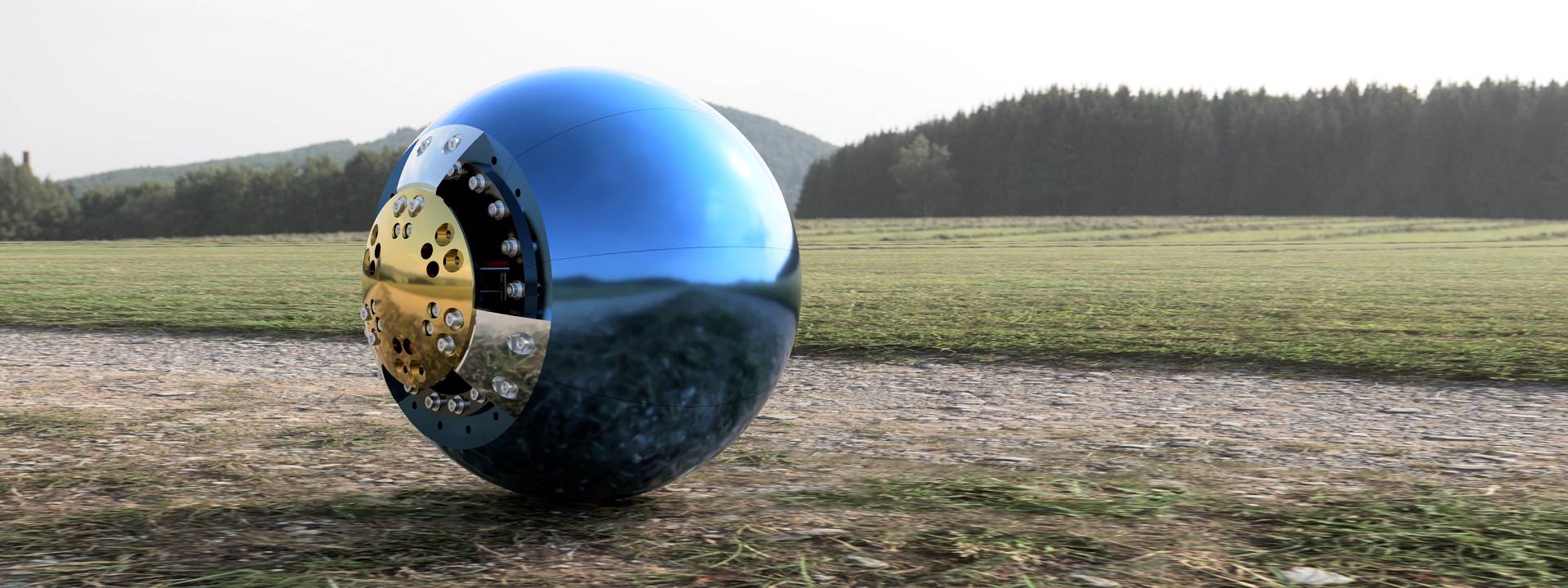
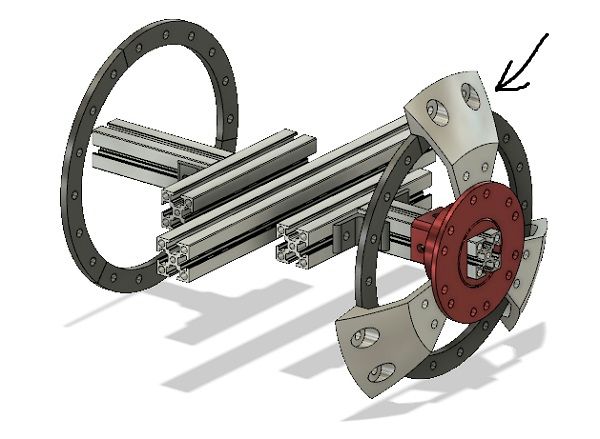
▼全体の構想▼
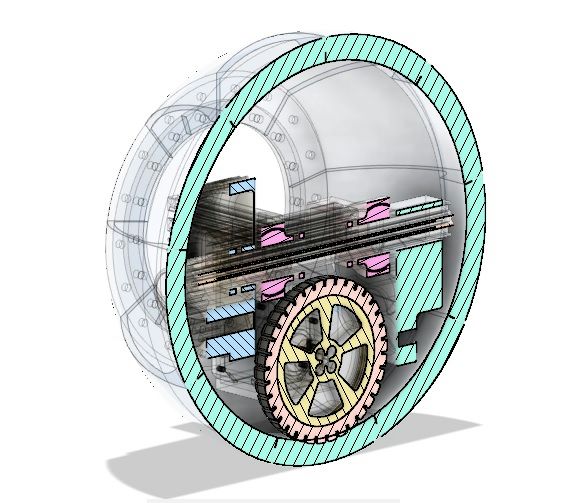
全体の断面です。このような感じで内側にタイヤを配置、タイヤで外殻を回転させて本体自体の前進、後退を行う予定。ハムスターのイメージです・・・。
▼ステッピングモーター▼
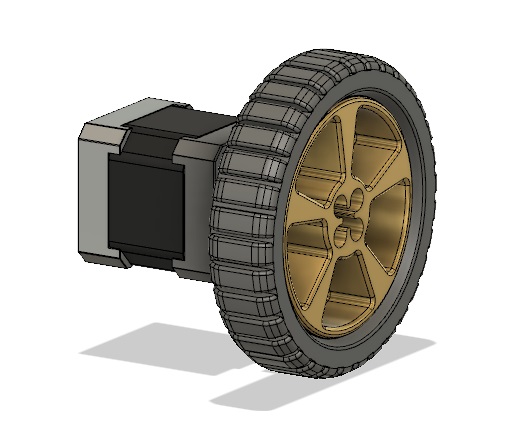
タイヤの回転にはステッピングモーターを使う予定。ふつうのDCモーターでもいいかと思ったのですが手持ちにステッピングモーターがあったため使いまわしです。モーターまで3Dモデル化する必要ないんですけどね。自己満足です・・。
直接モーターで外殻を回転させた方がいいかとも思ったのですが・・、タイヤの方法が失敗したら直接駆動の方法に変更したいと思います・・。
▼タイヤのモデル▼

いわゆるゴム部分をTPUフィラメントで、ホイール部分をPLAで成型します。
3Dプリンターで出力
▼ゴム部のタイムラプス動画です▼
初期段階のタイヤです。実はちょうど良い硬さを出すのと・・、さらにボール型ロボットへ組付けたときのクリアランス関係の調整で、何度かトライ&エラーを繰り返してます。
このタイプの3Dプリンター(ボーデンタイプ)では、柔らかいTPUフィラメントはまともに出力できないかと思ったのですが、特に何もせずヘッドの温度調整しただけで割とまともに出力してくれました。
▼で最終的なタイヤ形状▼

外形も変えて、インフィル充填率や壁の厚みで硬さを調整しました。

まだ若干硬めな感じですがこれで良しとします。ゴム弾性とありましたが伸びはほとんどありません・・。靴底のゴムのようイメージです。
▼ホイール部分▼

ホイールはPLA(青)で作成してます。タイヤとは無理嵌めです。
タイヤ、ホイール組立て

無理嵌めですが、なかなか悪くない仕上がりです。
▼モーターAssy▼

筐体をほぼバラシての組立てです。もう少し組立てのことも考えるべきでした。
さてうまく動くかどうか早く試してみたいです・・。がそのためにもそろそろ制御基板、制御プログラムの方を考えはじめないといけないです・・・。
コメント