ボール型ロボットの自作です。今回はステッピングモーターを固定するためのケースを3Dプリンターで作成します。
(ボール型ロボットの製作記録はこちらにまとめています)
|3Dモデル
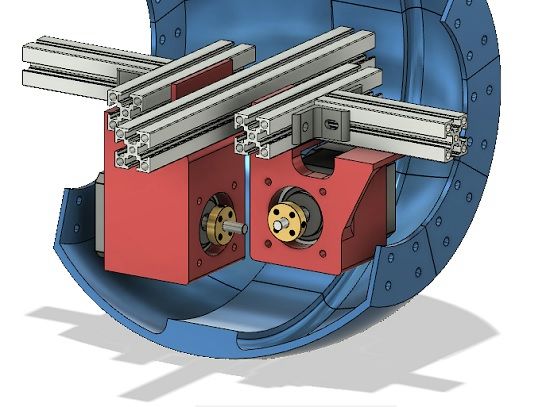
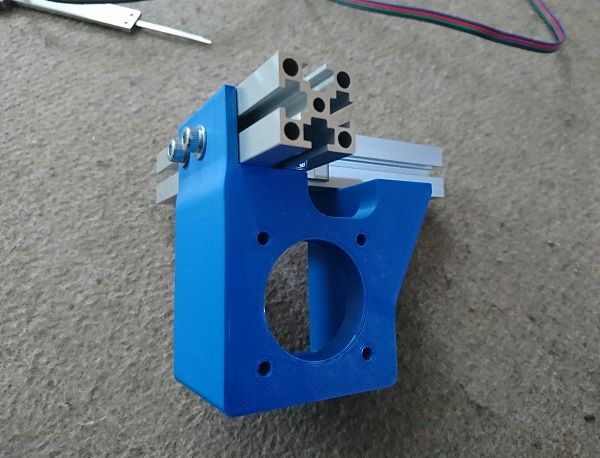
モーターはフレームにぶら下げる感じで配置。筐体内で宙に浮かすのである程度負荷がかかります。強度が出るように肉厚を気持ち厚めで設計してます。モーターはステッピングモーターを使用する予定。
現状、モーターは前進後退用と旋回用の2つを想定してます。
|3Dプリンターで出力
出力条件
材質 :PLA(青) 積層ピッチ:0.2mm ノズル温度:195℃ ベッド :60℃
▼で出力したケース▼
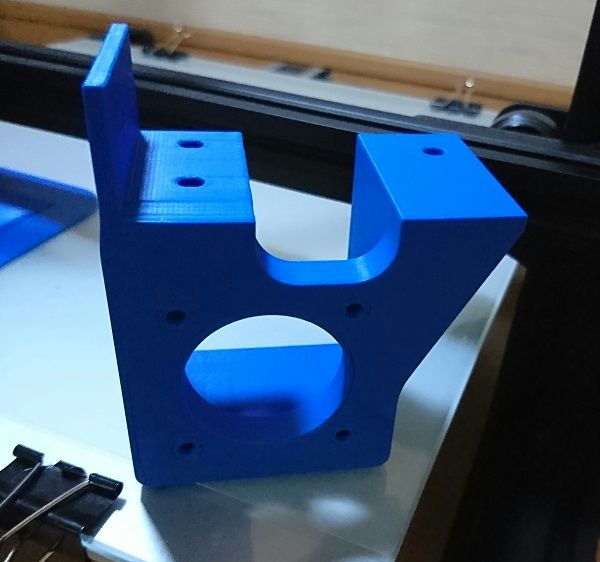
特に難しい構造でもないです。普通に出力。
▼組立て▼
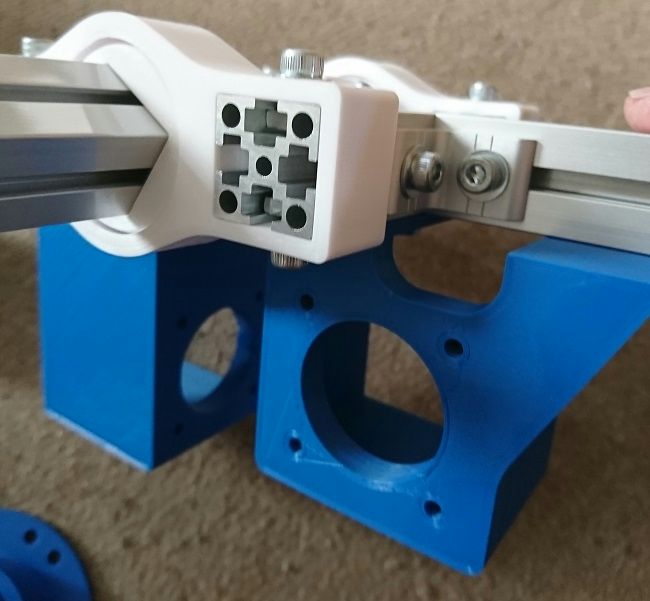
フレームに取り付け。組立てのことあまり考えてなかったせいで一度組み上げた筐体をほとんどばらしました・・。
▼もう一つも出力して組立て▼
▼筐体内に入れてみました▼

ステッピングモーター付けて、筐体に組み付けてみました。結構重たいです。側面で荷重を支えているスポーク部分の強度がちょっと心配・・・・。まだまだこのフレームにいろいろ部品をぶら下げる予定です・・。
コメント