
ボール型ロボットの構想です。これもドローン(クアッドコプター)同様、昔から作りたいと構想(妄想)だけで、なかなか着手していなかった案件です。ドローンの場合は、構想3年、ものつくり1年半と、すごく間延びした製作スピードで行っている状況・・。
実は、このボール型ロボットも2年くらい前から構想だけは練っているものの、(私の)ハードの工作技術が乏しく構想だけで眠らせていました。がこのたび3Dプリンターを手に入れて工作の幅が非常に広がったのでようやく本格的に製作を開始してみようと思っているところです。今回は構想中の3DCADモデルの紹介です。
(製作を開始しました。製作記録はこちらにまとめていってます。)
概要(ボール型ロボットとは)
(ボール型ロボットとは私が勝手に言っているだけですが・・。)スターウォーズのBB-8やIphonやスマホで操作するSphero(スフィロ)のことです。当時これを見たときにすごく不思議でどのような構造になっているのか非常に気になっていました。
ですが今では(過去には)、中身が公開されていたり、自作されている方もちらほら、、、海外サイト中心ですが製作記事や製作動画なども結構見かけます。
それら大いに参考にさせて頂きながら、自作したいなぁと思いつつ2年くらい前から3DCAD上で構想(妄想)だけ練ってます。
構造概要
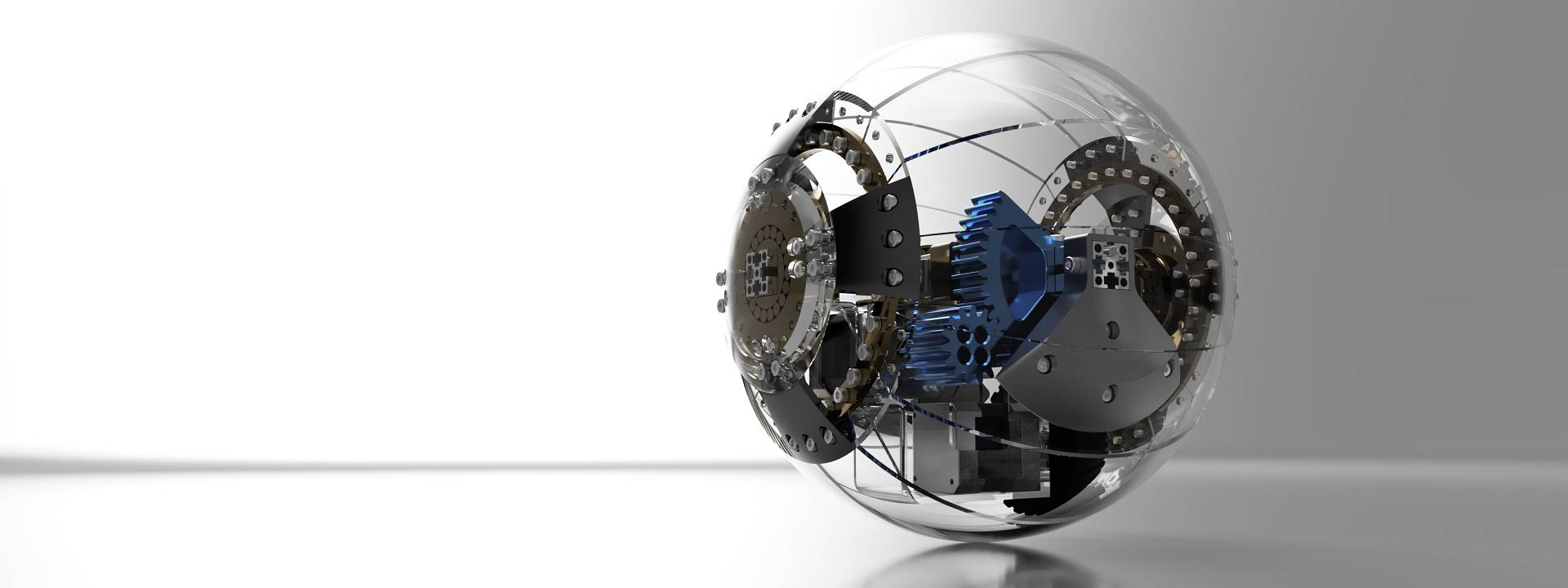
3DCADでの構想図です。以前から構想を練っている3Dモデルを元に、3Dプリンターで作成する前提で描き直してみました。
▼全体の3Dモデル▼(画像クリックで拡大)






まだまだ構想段階ですが、、構成部品の大半は3Dプリンターで作る予定。外殻部分はプリント出力し易いようするのと、内臓物の組み立てのことを考えて、みかんの皮むきのイメージで分割する予定です。
▼メイン駆動部▼


駆動部の骨格は3Dプリンター品では無く、アルミフレーム(アルミ構造材)を使用する予定。少し調べたらアルミフレーム使った方が、フィラメント重量分の材料費用より安価でいけそうな感じなので・・。


前後進は、筐体(外殻)を水平で支持して、下部のタイヤで外殻を回転させて動かす構想。筐体と水平支持部の接続はベアリングで支える予定です。できればこのベアリングは3Dプリンターで出力したいと思ってます。
大き目のバラストを搭載してモーター駆動で傾けることで、本体のローリング方向の傾きを発生させて旋回を行う構想です。
このバラストで機体の姿勢がふらつくのも制御する予定。制御系はArduinoUNOを中心に構成する予定です。
今のところのざっくりした構造はこんなところです。設計的なところはほとんど行ってなく、単に3DCADでイメージ(お絵描き)しただけ。ですのでこれから少しずつ細かい所詰めていくので、大きく構想が変わってしまうこともあるかも・・・。
今回は3DCADギャラリーのようになってしまいましたが、次回からはこのブログで少しずつでも製作記事を紹介していく予定です。
コメント