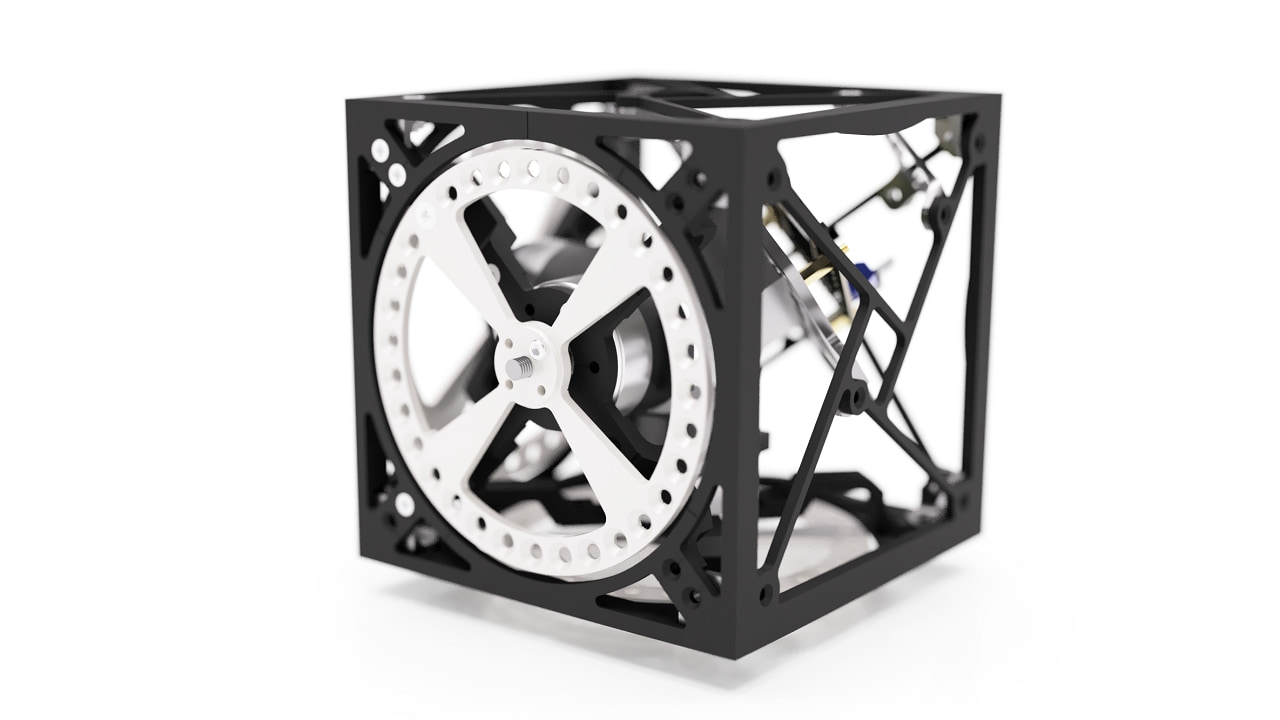

3軸姿勢制御モジュールの自作です。今回は2号機組立ての続きになります。
概要
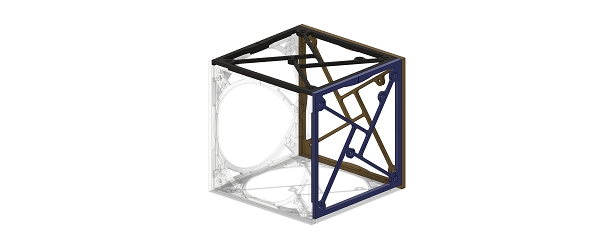
前回まででモーターを固定する側の3面分を作成しました。今回は残りの3面を作成してモジュールを完成させます。
残りの反分。この面にセンサー、基板、バッテリーを搭載します。ここの部材も多くは3Dプリンターで準備していきます。
センサーブラケットの作成
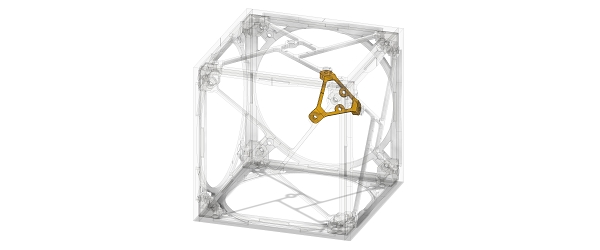
本体の角部に6軸センサーを取り付けます。そのためのブラケットを作成していきます。制御時の計算が楽になるよう点倒立したときにセンサーが水平になるような形状にしてます。1号機の時にキャリブレーション苦労したので、センサー軸は筐体の辺(稜線)に合わせようとしていたのを忘れて同じことしてしまいました。
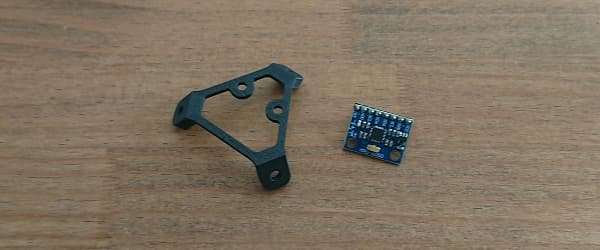
材質はPLA(黒)。小さな部品なので20分程度で出力完了。となりは6軸センサー(MPU6050)
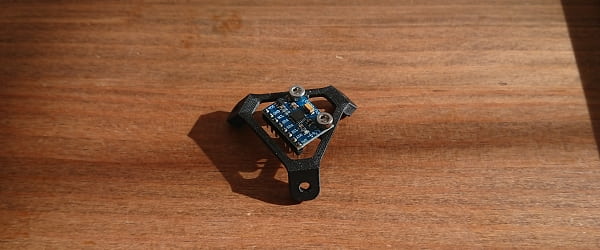
ボルト&ナットでセンサーを固定して完成。
基板&バッテリーブラケットの作成
続いて基板とバッテリーを固定するブラケットを作成していきます。
点倒立時に重心バランスがなるべく中央にきて欲しいため、倒立したときに水平中央にくるような構造にしてます。

材質はPLA(黒)。大体2時間程度です。ここに基板とバッテリーを搭載します。

基板をスペーサで固定。基板作成しておいたのですがそのうち作りなすかも。バッテリはまだ入手していないのでここでは搭載してません。基板の反対側にタイバンドで固定する予定です。
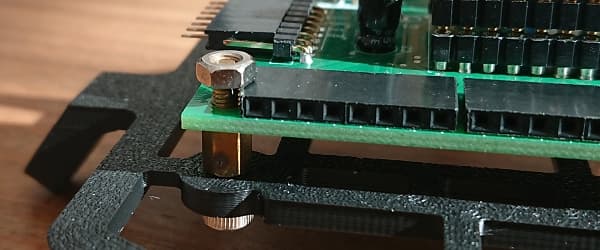
穴位置が悪くピンソケットとナットが干渉。ナットが乗り上げてますが固定はできているのでとりあえずこのままいきます。そのうちここも回路と合わせて修正します。
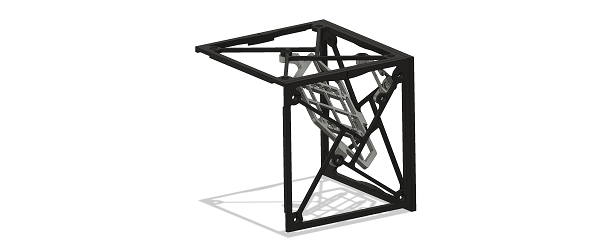
次にフレームを作成していきます。
フレームの作成・組立て
先ほど作成したセンサーと基板を取付けるフレームを作成します。
3面分のフレームにセンサー、基板を固定します。

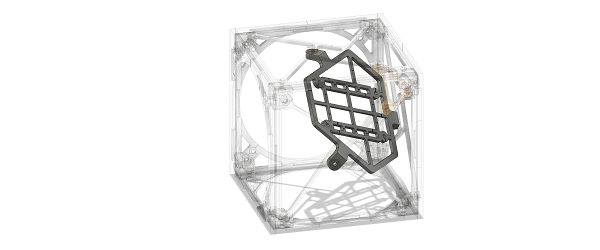
材質PLA(黒)、1枚2時間半程度。右上に写っているのがキューブスペーサー、この部品でフレームを組立てます。
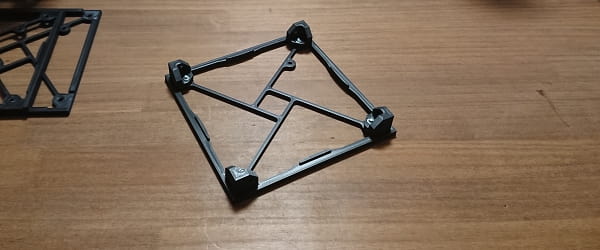
キューブ型のスペーサーを四隅にビス止めします。

残り2面のフレームを組立て。これにセンサーと基板と取付けます。
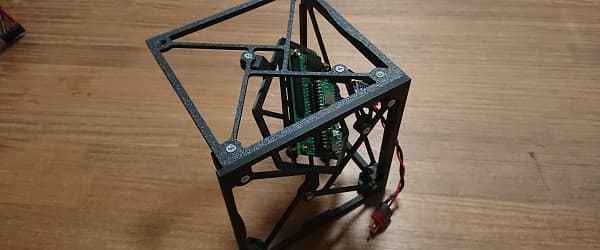
基板、センサーをフレームにねじ止め。
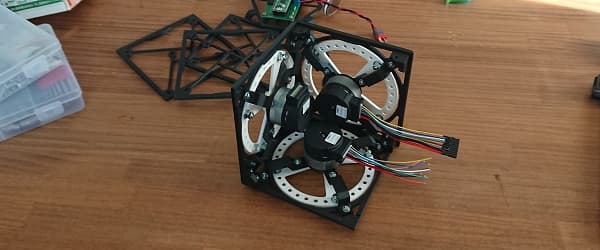
最後に前回作成しておいたモーター側のフレームと合体させて完成となります。

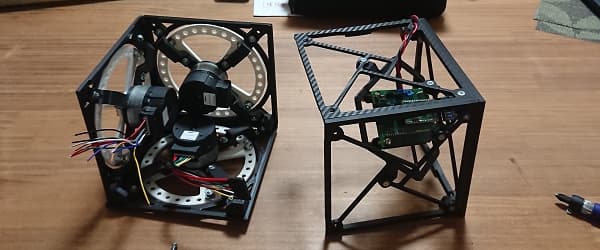
3Dプリンターの精度が良く設計通りにピタッと物が出来上がっていくのが楽しいです。一応、2号機は小型軽量化を目指していたので1号機と比較してみます。

1号機の重量。バッテリ、リアクションホイールは外した状態で764g。ホイール込で1097gでした。

2号機の重量。こちらもバッテリ、ホイール無しで660g。10%強くらいの軽量化です。サイズは1辺152mm⇒136mmと小型化している割に思いのほか軽量化はできていないようです。
次回より制御プログラムの検討に入っていきます。

コメント