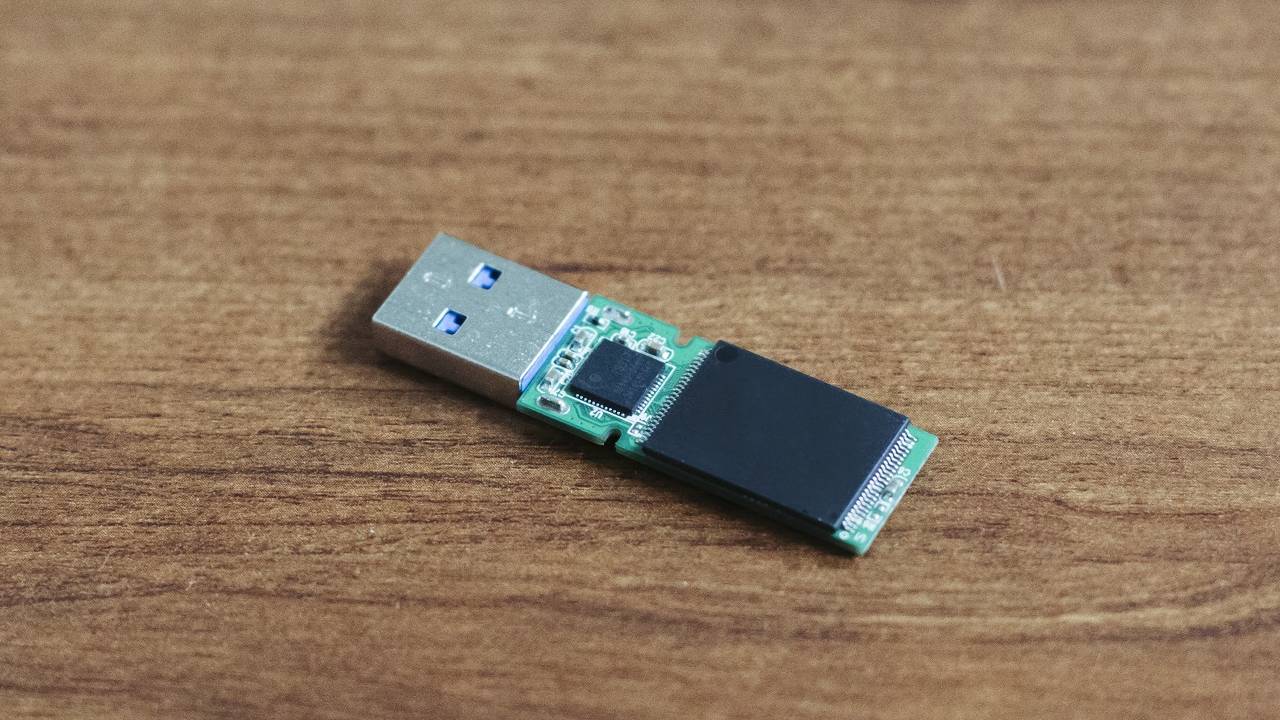
以前、Wiiモーションプラスのジャイロスコープを取り出し、角速度の検出試してみたが今回はそのジャイロスコープの測定ドリフト値がどれくらいかあるか確認してみようと思います。
角速度検出は、I2C通信で受信した値をそのまま使用。角度の積分計算についてもはいっさい補正計算をせず、そのまま積算してみました。
計測値そのままをArduinoのシリアルプロットで表示してみました▼
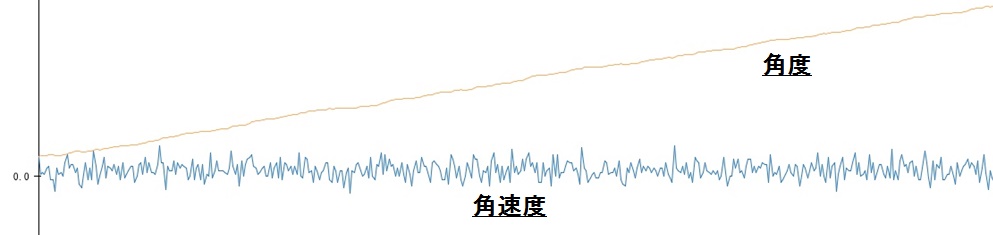
真ん中でぎざぎざしてるのが測定した角速度そのままのグラフ。右上にまっすぐ駆け上がっていってるグラフが角度の積算したグラフ。ドリフト発生の予想はしていたが思ったよりドリフトがすごい。ちなみに数十秒間の計測でこれだけドリフトが発生。
端数を丸めたりキャリブレーションとったりする補正だけでもである程度ドリフトは抑えられると思うがどれだけ抑えられるかはわからない。あとここでは結果を記載しなかったがピッチ、ローリング、ヨーイングで1方向だけ精度がずれていました。
ジャイロICの種類が1方向だけ違うのかな?そういえば参考にしたサイトにそんなことが書いてあったような・・。英語なのでよくわからない。
カルマンフィルターとか私には高度過ぎて無理そうだし・・。どうやってドリフト補正していこうかな。
コメント