RaspberryPi用カメラモージュールのチルト構造を持ったマウントケースを3Dプリンター+サーボモータで作成してみました。
少し前にカメラ用のマウントを作成したのですが、クローラーロボットに搭載するのにチルト機構くらいついてた方が良いかと思い作り直しました。
▼3Dモデル▼

小型のサーボでチルト(上下の角度変更)を行う構造です。カメラの背中に小型サーボ。土台部分に RaspberryPiZero を収納できるようにしてます。パン方向はつけませんでした。
イメージはAmazonで販売している物を参考にしてます。購入しても良かったのですが RaspberryPi 上に乗るようにカスタマイズしたかったので自作しました。
 | イドミせ SG90サーボ用 2軸 カメラマウント 2軸アングル FPV 空撮にも (マウント 2個SG90) [並行輸入品] 新品価格 |
▼土台(ケース)部分▼

3Dプリンターで無理のないよう造形できるように、ケースは土台、真中、カバーと分割してます。
▼3Dプリンターで出力▼

作成した3Dモデルから3Dプリンターで出力。材質はPLA(黒)とPETG(クリア)。材質にあまり意味はありません。
▼カメラ部分の組立て▼

M2ねじでカメラごとケースを共締めする構造です。

蓋して完成。いったんカメラ部分は置いておきます。
▼アームの取付け▼

サーボホーンとの間に挟み込むようにアーム部品を固定します。ここはガタをなるべく無くしたいので、寸法調整しながら何度か3Dプリント出力して現物合わせしてます。
▼サーボの取付け▼
カメラの背中にサーボを取付けます。ここから土台側を作っていきます。
▼土台(本体)側▼

RaspberryPiZeroを収納するケースです。カメラケース同様に造形のことを考えて3部品構成です。
▼組立て▼

カメラケース同様にM2ねじでラズパイとケースを共締めしてます。一応GPIOピンにアクセスできるように大きく穴開けてます。
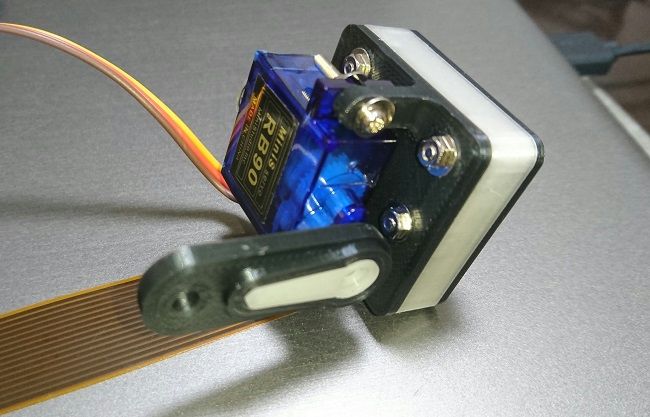
▼完成▼
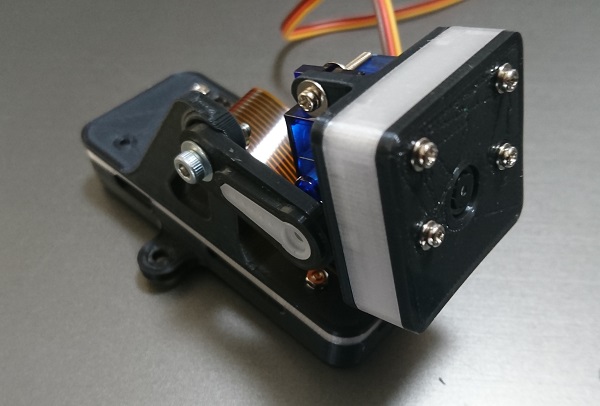
カメラとケースをM3ボルトナット繋げて完成です。
サーボの可動音がジリジリとうるさくて少し気になりますが予定通り完成です。

コメント