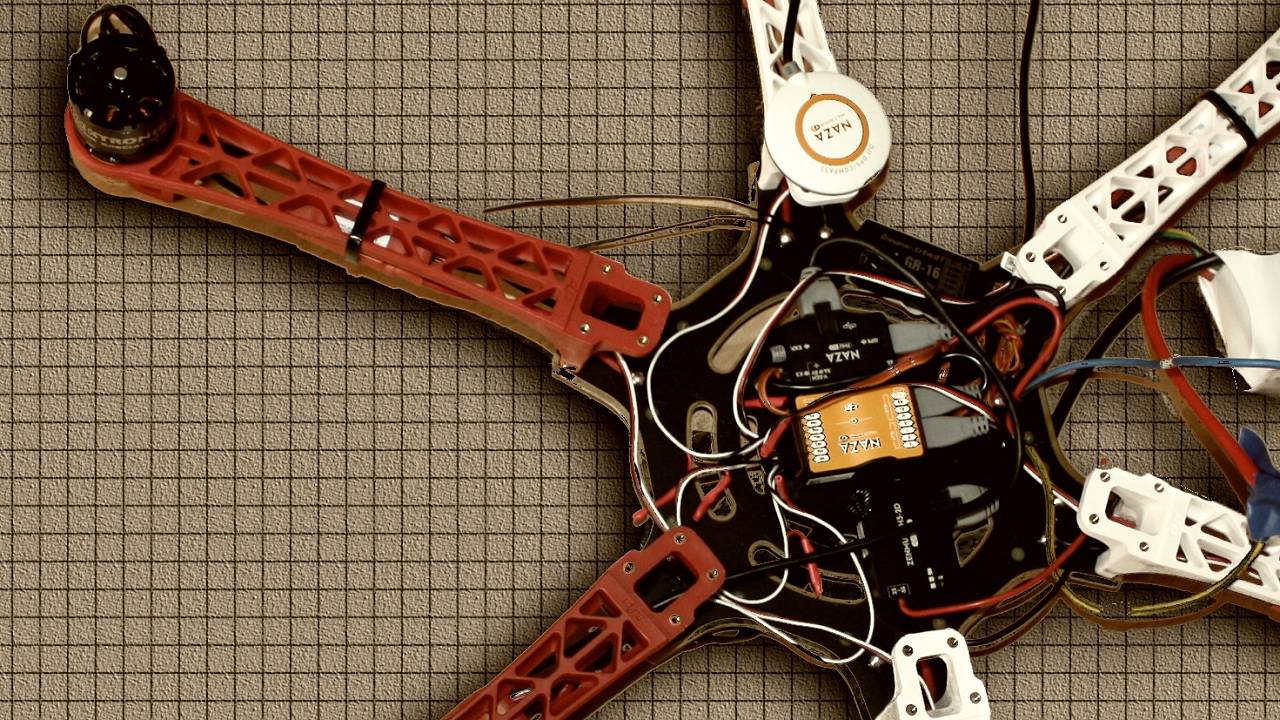

ドローン(クアッドコプター)弐号機のハード・ソフトがある程度が出来てきたので、制御プログラムとモニター画面の稼働確認をしてみました。
▼これまでの製作記録はこちらにまとめていってます▼

▼確認動画▼
制御プログラムは確認用に少し修正してテストしてます。いきなりプロペラ付けると危険な感じなので、モーターにはティッシュ付けてます
壱号機と弐号機の制御アルゴリズム(考え方)はほぼ同じで、今のところ制御は6軸センサーを使った姿勢制御のみです。モニター画面(Processing)は一新してます。
制御プログラムの細かいところはちょこちょこ修正していて、6軸センサーから姿勢角度算出するところと、パソコンと機体の通信(Bluetooth)部分はだいぶ見直してます。
懲りずにマウス操作で機体の操作してます。半自立飛行を目指しているのでできればこのままマウス操作で飛行できるようにしたいのですが・・・。壱号機のときは断念してゲームコントローラーで操縦してました▼

まずは壱号機同様に姿勢制御で飛行できるようにして、その後、位置(水平、高度)制御加えてより安定した飛行ができように改良を加えていくつもりです。
コメント
こんにちは。ブラシレスモーターの制御をしているものです。
動画を見ましたが、1033というのはPWMの出力値でしょうか?
もしPWMであれば、分解能の変更の仕方を教えて欲しいです。
めいさん。サイト拝見下さり有難う御座います。
「1033」はPWM出力値と解釈してO.Kです。正確にはパルス幅の時間(長さ)です。
PWM出力の生成方法はこちらの記事後半のほうに記載してますので一度ご確認いただけますでしょうか。
お初に投稿します。
いつも興味が尽きることのない記事を愉しくご拝読させていただいています。
記事へのコメントではありませんが、忙しいお時間の中での改良、開発
への情熱に感銘を受けています。
今後も一層の研鑽が記事が掲載されることを切に願っています。